

Nach Angaben der Deutschen Lebens-Rettungs-Gesellschaft DLRG sind im Jahr 2019 fast 420 Menschen ertrunken. Die meisten Unfälle mit tödlichem Ausgang gab es in Binnengewässern wie Seen, Weihern oder Flüssen, aber auch in Schwimmbädern verloren Menschen ihr Leben. Der Grund ist, dass ausgebildete Bademeister fehlen, was sogar dazu führte, dass Schwimmbäder geschlossen wurden. Und Besserung ist nicht in Sicht, denn auch an Nachwuchs mangelt es. Ein schwimmender Rettungsroboter, der das Personal künftig bei Notfällen unterstützen soll, könnte ein Weg aus dieser Misere sein. Deshalb hat ein Forscherteam des Fraunhofer-Instituts für Optronik, Systemtechnik und Bildauswertung IOSB in Ilmenau mithilfe des Wasserrettungsdienstes Halle e.V. ein solches Unterwasserfahrzeug entwickelt.
“Es gibt typische Körperpositionen, an denen man erkennt, dass sich jemand in Gefahr befindet”, erklärt Informatiker Helge Renkewitz, der das abgeschlossene Projekt in enger Zusammenarbeit mit dem Wasserrettungsdienst Halle e.V. geleitet hat. Hierzu wurden an der Hallendecke Überwachungskameras angebracht, die die Bewegungsmuster und Position des Ertrinkenden im Becken registrieren und die Koordinaten an den Roboter senden. Dieser löst sich daraufhin aus einer Dockingstation am Boden des Schwimmbeckens und fährt zu den angegebenen Koordinaten. Dort ortet er mithilfe von Kameras die gefährdete Person und befördert sie an die Wasseroberfläche. Dabei sorgt eine Fixier- und Fangvorrichtung dafür, dass der leblose Körper beim Auftauchen nicht herunterrutscht. Diese Vorrichtung lässt sich laut Angeben der Wissenschaftler auch auf andere Unterwasserfahrzeuge montieren.

Tests erfolgreich abgeschlossen
An Badeseen, an denen es keine Decke gibt, and die Überwachungskameras montiert werden könnten, übernehmen Flugdrohnen und Zeppelinsysteme die Aufgabe der Kameras. “Diese Drohnen und Werbeballons lassen sich problemlos mit Kameras ausstatten”, sagt Renkewitz. Da das Wasser an Seen, anders als in Schwimmbädern, trübe ist, muss das Unterwasserfahrzeug anstelle von optischen mit akustischen Sensoren ausgestattet sein. So können Lage und Ausrichtung von Personen mithilfe des Echos der Schallwellen bestimmt werden und der Roboter kann die Zielperson autonom ansteuern und aufnehmen.
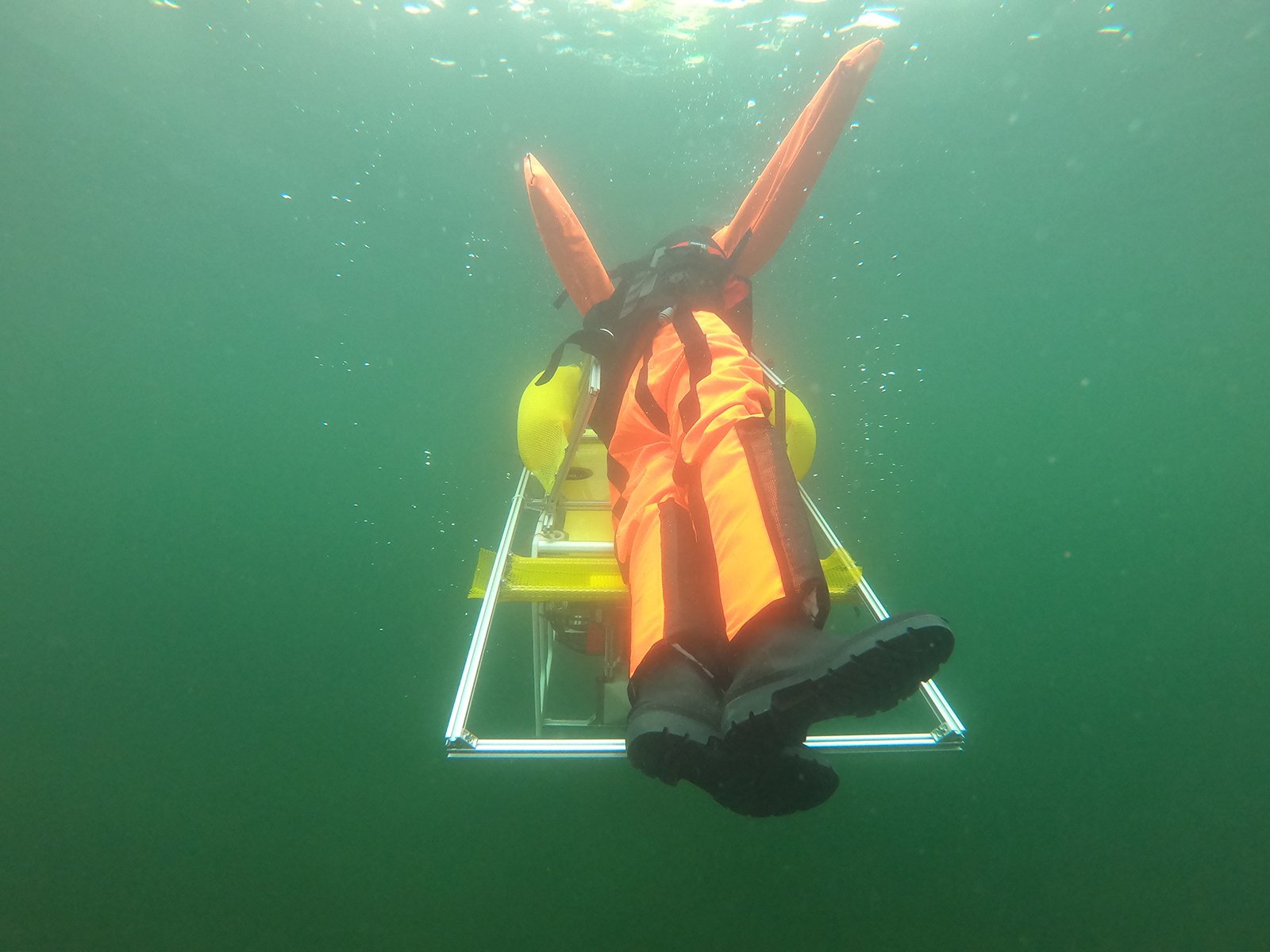
In Freiwasser-Tests im Hufeisensee bei Halle (Saale) haben die Forscher bereits bewiesen, dass auch das in der Praxis einwandfrei funktioniert. Der Rettungsroboter hat hier einen 80 Kilo schweren Dummy in drei Metern Tiefe aufgenommen, fixiert, innerhalb einer Sekunde an die Wasseroberfläche befördert und ihn dann auf dem kürzesten Weg zum Ufer gebracht, wo bereits die Rettungskräfte warteten. Diese werden alarmiert, sobald der Roboter über einen Notfall informiert wird. “Die komplette Rettungsaktion dauerte gut zwei Minuten”, sagt Renkewitz. “Verunglückte müssen innerhalb von fünf Minuten reanimiert werden, um dauerhafte Schäden auszuschließen. Diese kritische Zeitspanne konnten wir problemlos einhalten.”
Futuristische Optik
Das aktuelle System ist etwa 90 Zentimeter lang, 50 Zentimeter hoch und breit und mit Batterien, Antrieb, Kameras, optischen und Navigationssensoren ausgestattet. Künftige Systeme sollen aber kleiner, leichter und kostengünstiger werden als der bisherige Prototyp, und die Wissenschaftler wollen verschiedene Versionen für den Einsatz in Schwimmbädern und im Binnengewässer bauen. Dazu soll sich der Roboter auch optisch verändern und das stromlinienförmige Design eines Rochens haben.
Der Wasserroboter ist bereits zum Patent angemeldet und könnte in modifizierten Versionen auch andere Aufgaben übernehmen wie etwa bei Offshore- und Staumauerinspektionen oder in Fischfarmen, um die Gesundheit der Fische zu überwachen. “Der Anwendungsbereich ist breit gestreut, unsere Unterwasserfahrzeuge eignen sich beispielsweise auch für das Aufspüren und die Prüfung von archäologischen Funden am Boden von Gewässern”, sagt Renkewitz.
Das Vorhaben wurde vom Bundesministerium für Wirtschaft und Energie BMWi gefördert.
Titelbild: Beim Befördern an die Wasseroberfläche rutscht der Dummy beim Test im Hufeisensee nicht von der Fixiereinheit ab. © S.Thomas (Wasserwacht Halle)
Auch interessant:
Kabelloser Wasserroboter soll künftig Gewässer reinigen
Wasserroboter imitiert die Bewegung des Thunfischs, um den Geschwindigkeitsrekord zu brechen