

Zwemmen is nooit zonder risico. In 2019 verdronken in Nederland 76 mensen. Zelfs als er oplettende leden van een reddingsbrigade of badmeesters een oogje in het zeil houden kunnen mensen bij het zwemmen in problemen komen. De mensenredders krijgen binnenkort hulp van een slimme onderwaterrobot, die kan helpen bij het observeren en het redden van mensen in zwemwater. De robot is ontwikkeld door het Fraunhofer-Instituts für Optronik, Systemtechnik und Bildauswertung IOSB in Ilmenau met behulp van de reddingsbrigade in het Duitse Halle.
“Er zijn typische houdingen van een lichaam waardoor je kunt zien dat iemand in gevaar is,” legt computerwetenschapper Helge Renkewitz uit, die het project leidde. Daartoe werden bewakingscamera’s aan het plafond van de hal gemonteerd, die de bewegingspatronen en de positie van de drenkeling in het zwembad registreren en de coördinaten naar de robot sturen.
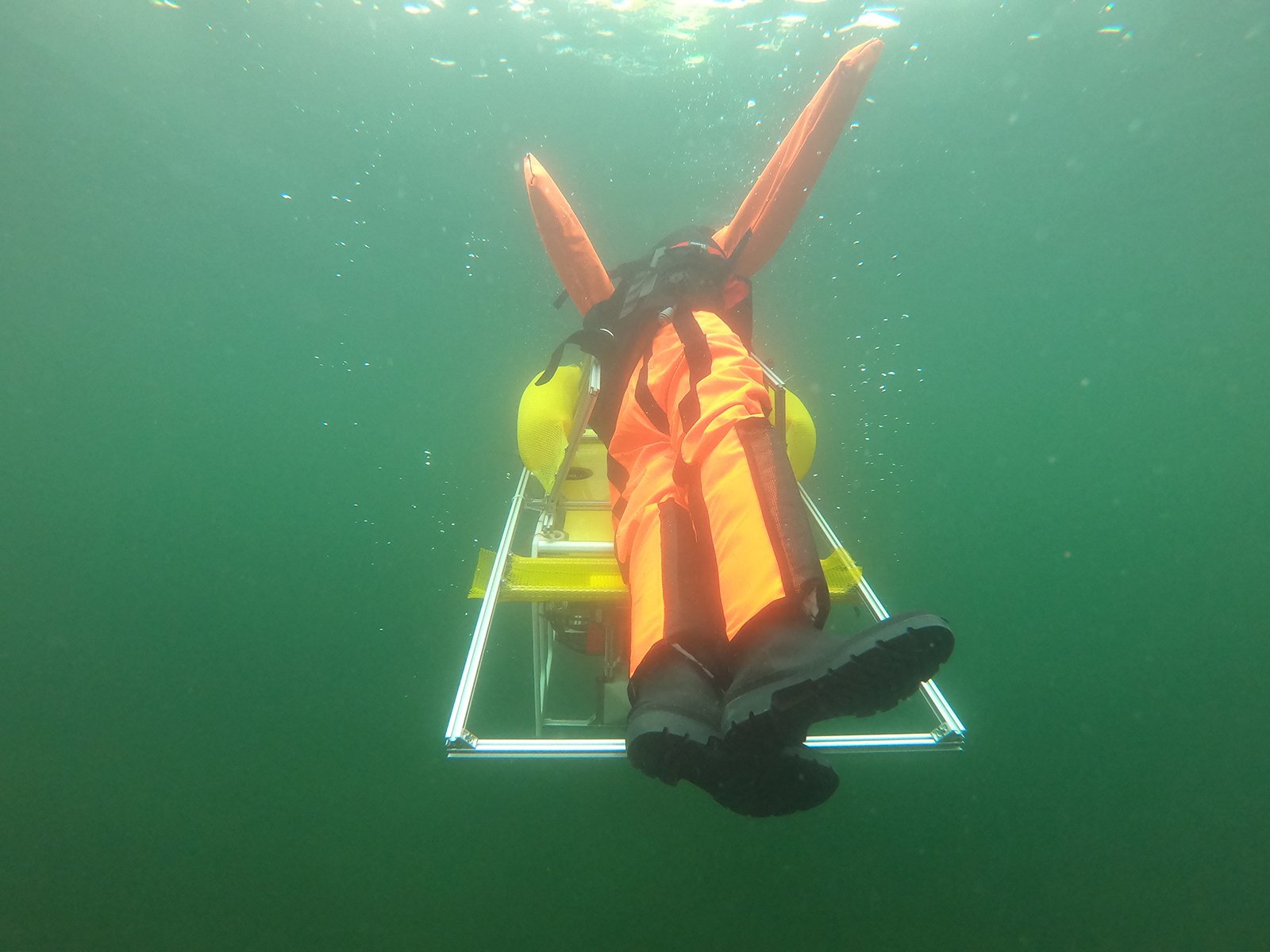
De robot verlaat vervolgens een docking station op de bodem van het zwembad en vaart naar de opgegeven coördinaten. Daar lokaliseert het apparaat met behulp van camera’s de zwemmer die in gevaar is en brengt hem naar boven. Daarbij zorgt een fixatie- en vanginrichting ervoor dat het levenloze lichaam niet wegglijdt als de robot naar de oppervlakte stijgt.

Drones en luchtballons
Als er geen mogelijkheid is om camera’s aan een plafond te bevestigen, dan kan de observatie ook vanuit een drone of een luchtballon geschieden. “Drones en ballonnen kunnen gemakkelijk worden uitgerust met camera’s,” zegt Renkewitz. Aangezien het water in meren troebel is, in tegenstelling tot dat in zwembaden, moet het onderwatervoertuig worden dan weer wel uitgerust met akoestische sensoren in plaats van optische. Op deze manier kunnen de positie en oriëntatie van personen worden bepaald aan de hand van de echo van de geluidsgolven, en kan de robot autonoom naar de drenkeling navigeren en deze veilig stellen.

Kritische tijdsspanne
Bij proeven in open water in de Hufeisensee bij Halle (Saale) hebben de onderzoekers al bewezen dat dit ook in de praktijk perfect werkt. Hier haalde de reddingsrobot een dummy van 80 kilo op een diepte van drie meter op en bracht deze keurig op het apparaat gefixeerd binnen de kortste keren naar de oppervlakte en vervolgens naar de waterkant, waar de reddingstroepen al stonden te wachten. Deze worden gealarmeerd zodra de robot reageert op een noodsituatie. “De hele reddingsoperatie duurde ruim twee minuten,” zegt Renkewitz. “Slachtoffers moeten binnen vijf minuten gereanimeerd worden om blijvend letsel te voorkomen. We hebben deze kritische tijdspanne zonder problemen kunnen halen.”
Futuristisch uiterlijk
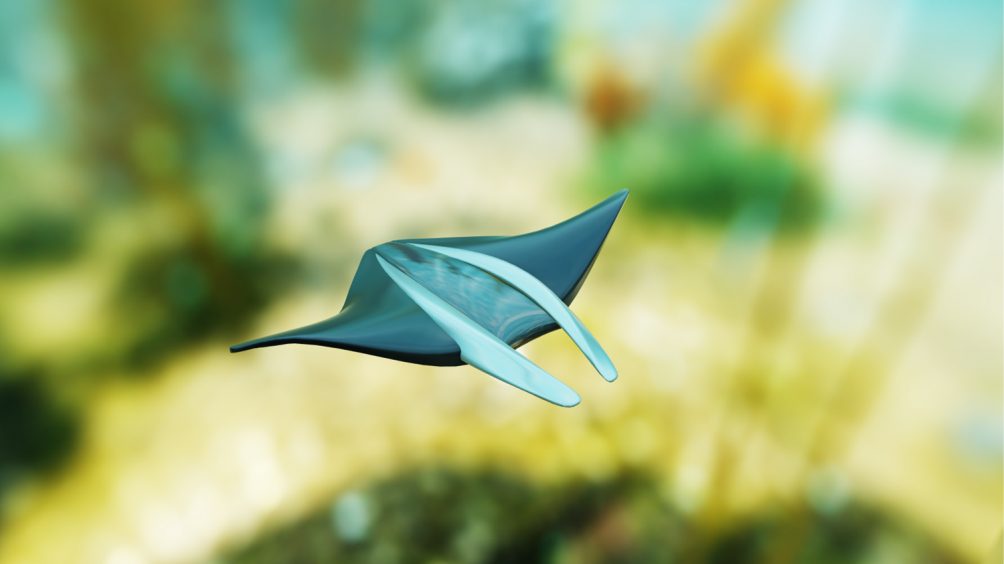
Het huidige model is ongeveer 90 centimeter lang, 50 centimeter hoog en breed. De robot is uitgerust met batterijen, voortstuwingssysteem, camera’s, en optische en navigatiesensoren. Toekomstige systemen moeten echter kleiner, lichter en goedkoper worden dan het huidige prototype. De wetenschappers willen verschillende versies bouwen voor gebruik in zwembaden en in binnenwateren. Daartoe zal de robot naar verwachting ook van uiterlijk veranderen en het gestroomlijnde ontwerp van een rog krijgen.
Voor de robot is reeds een octrooi aangevraagd. Aangepaste versies kunnen ook worden gebruikt voor andere taken, zoals offshore-inspecties en daminspecties, of in viskwekerijen om de gezondheid van de vissen te bewaken. “Het scala aan toepassingen is breed. Onze onderwatervoertuigen zijn bijvoorbeeld ook geschikt voor het opsporen en inspecteren van archeologische vondsten op de bodem van watermassa’s,” aldus Renkewitz.
Foto: © S.Thomas (Wasserwacht Halle)
Ook interessant:
Draadloze waterrobot reinigt water en neemt ook nog eens monsters
Als je dit artikel leuk vindt, lees dan ook:





