


Roboter können schon erstaunlich viel: sie laufen, tanzen und tragen schwere Lasten. Wenn es aber um das Automatisieren von handwerklichen Tätigkeiten geht, bei denen Fingerfertigkeit und Feingefühl gefragt ist, versagen sie immer noch kläglich. Besonders problematisch ist die Verarbeitung von weichen Materialien, die sich bereits durch die Schwerkraft verformen, wie etwa Klebefolien, Leder oder technische Textilien. Das sind Materialien wie sie zum Beispiel in der Automobilindustrie bei der Verkleidung von Armaturen oder in der Stahlindustrie beim Aufbringen von dünnen Metallfolien verwendet werden.
Herausforderndes Automatisieren
„Beim Automatisieren geht es auch immer um das Verstehen der jeweiligen Situation. Dieses Verständnis hat der Mensch, liegt für eine Maschine aber im Allgemeinen nicht vor“, erklärt Professor Andreas Kugi, Vorstand des Instituts für Automatisierungs- und Regelungstechnik an der TU Wien und Leiter des Center for Vision, Automation and Control am AIT. Wenn der Mensch bei einem Textil zum Beispiel eine Falte sieht, dann weiß er genau, was er mit seinen Händen tun muss, um die Falte zu glätten. Er koordiniert mühelos Sehvermögen mit Fingerfertigkeit und kann sich an unterschiedliche Materialien, Formen und Strukturen anpassen. Roboter sind noch weit von diesen menschlichen Fähigkeiten entfernt. Das zeigen beispielsweise Versuche, in denen Roboter die Aufgabe bekommen, ein T-Shirt schnell und faltenfrei zusammenzulegen.
Weiche verformbare Materialien …
An diesen Stand der Technik knüpfen Kugi und seine Teams an. Dabei liegt ihr Forschungsfokus nicht in der Massenproduktion, sondern in der hochflexiblen Fertigung von geringen Stückzahlen; das heißt, im Automatisieren von bestimmten Aufgaben, die man schnell erlernen und an ähnliche Aufgaben anpassen kann.
Auch interessant: Einige Hypes und verpasste Chancen in der Robotik
In Kooperation mit Industriepartnern konnten sie bereits erste Erfolge verzeichnen. Sie schafften es, einen 3D-Hasen entlang von exakt vorgegebenen Pfaden mit geraden und kurvigen Streifen faltenfrei zu bekleben. Der 3D-Hase wurde stellvertretend für ein freigeformtes dreidimensionales Objekt gewählt. Ein solches Objekt hat keine ebene Oberfläche, wie etwa eine Kugel oder ein Kubus, sondern Krümmungen in alle Raumrichtungen, wie eben ein Hase, ein Waschbecken, eine Turbinenschaufel, ein Schuh et cetera.
… und freigeformte Objekte
Die Herausforderung war es, den Roboter entlang der gekrümmten Oberfläche so zu bewegen, dass sämtliche Punkte entlang des Pfades erreicht werden, ohne dass sich das Werkzeug um die Hochachse dreht. Eine solche Drehung würde zum Knittern des Klebestreifens führen. Die Grundlagenforschung dazu erfolgte im Team an der TU Wien. Die Problemlösung lieferte eine neue oberflächenbasierte Pfadregelung, die es in dieser Form noch nicht gab.
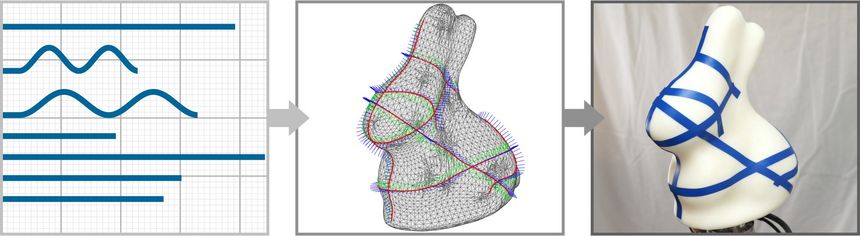
Die Forscher demonstrierten die Aufgabe prototypisch an einem 7-Achs-Roboter und einer Drapierrolle, wobei die Drapierrolle ortsfest montiert wurde und das Zielobjekt vom Roboter bewegt wurde. Somit führte der 7-Achs-Roboter den 3D-Hasen mit all seinen Krümmungen im dreidimensionalen Raum gezielt an der Drapierrolle entlang; wobei die entworfene Regelung alle Freiheitsgrade des Roboters und des Werkzeuges ausnützt, um eine optimale Bewegung auszuführen.
Videos dazu finden Sie unter diesen Links: https://www.acin.tuwien.ac.at/52f5/
https://doi.org/10.1109/TRO.2020.3033721
Fusionieren der Sensorik
Diese Art der Automatisierung fordert vom Roboter eine Vielzahl von unterschiedlichen Fähigkeiten: Je nach Größe und Form des Objektes müssen seine Bewegungen ständig angepasst und die auszuübenden Kräfte im Kontaktpunkt tangential (streifend) und orthogonal (senkrecht) zur Oberfläche gezielt abgestimmt werden. Hier arbeiten die Forscherteams mit verschiedenen Sensorkonzepten, unter anderem mit Kraftsensoren und Kamerasystemen. Die Wahl der richtigen Sensorik und das Fusionieren der Sensordaten spielen dabei eine entscheidende Rolle.
Der Professor und seine Teams verfolgen einen holistischen Forschungsansatz und näherten sich dem Problem in einem generellen Ansatz, sie sagten: „Wir haben es mit beliebig gekrümmten dreidimensionalen Objekten zu tun und wollen an deren Oberflächen etwas bearbeiten“ Neben dem Kleben könnte das auch sprühen, polieren, drucken, nähen oder reinigen sein.
Automatisierungsarchitektur
Um diese Flexibilität zu erreichen, ist es notwendig, eine geeignete Automatisierungsarchitektur zu entwerfen. Unterlagerte Regelkreise ermöglichen dabei eine sehr einfache und hochflexible Bewegungsplanung entlang der Oberfläche von freigeformten dreidimensionalen Objekten. Je nach Aufgabe können in den unterschiedlichen Raumrichtungen streifend (tangential) und senkrecht (orthogonal) zur Oberfläche bestimmte Toleranzen vorgegeben werden. Bei Kontakt mit der Oberfläche kann auch das gewünschte Steifigkeitsverhalten eingestellt werden.

„Wenn wir zum Beispiel das Besprühen von Oberflächen automatisieren, dann können wir neben der Entfernung des Sprühkopfs zur Oberfläche auch den Winkel der Düse inklusive der erlaubten Toleranzen relativ zur Oberfläche spezifizieren, um eine möglichst homogene Sprühschicht auf der dreidimensionalen Oberfläche zu erhalten.“
Professor Andreas Kugi
Kognitive Layer
Zurzeit arbeiten die Forscherteams an dem äußeren, dem kognitiven Layer der Automatisierungsarchitektur. Dieser soll es ermöglichen, zwei Dinge gezielt zu lernen:
- die Abstände und Winkel des Werkzeugs relativ zur Oberfläche;
- die Kontaktsteifigkeiten für die jeweiligen Anwendungen;
Dadurch können die gewünschten Bearbeitungsaufgaben bestmöglich erfüllt werden. Wenn der Roboter eine bestimmte Anzahl von Teilen bearbeitet hat, dann hat er daraus so viel gelernt, dass er diesen Bearbeitungsprozess auch auf ein neues Teil anwenden kann, das er so noch nie gesehen hat.
Vorzeigen statt Programmieren
Nicht alle Aufgaben können Maschinen ganz alleine übernehmen. Deshalb arbeiten die Forscherteams auch an Methoden, mit denen Mensch und Maschine besser zusammenarbeiten können.
„Wenn Flexibilität erforderlich ist, dann stellt sich die Frage, wie man der Maschine möglichst schnell beibringen kann, was sie machen soll. Eine mögliche Variante ist, dass der Roboter ‚den Menschen um Hilfe bittet’, wenn er bestimmte Aufgaben nicht selbstständig erledigen kann.“
Professor Andreas Kugi
Mit dem kinästhetischen Lernen kann dem Roboter die Aufgabe einfach gezeigt werden. Dabei schaltet man den Roboter auf weich und nachgiebig und führt ihn entlang der Oberfläche, um ihm quasi vorzumachen, was er zu tun hat. Bei komplexeren Aufgaben auf Oberflächen von 3D-Objekten kann dies aber sehr mühsam werden. Daher verfolgen die Forscher die Idee, neue Aufgaben mit sogenannten ‚instrumentierten Werkzeugen’ vorzuführen. Denn wenn der Roboter das baugleiche Werkzeug wie der Mensch verwendet, können die Bewegungs- und Kraftverläufe sehr einfach auf den Roboter übertragen werden.
Ein Seil aufwickeln
In einem Projekt gab das Forscherteam dem Roboter beispielsweise die Aufgabe ein Seil gezielt aufzuwickeln. Dabei reicht es nicht aus, nur die Position im Raum vorzugeben, man muss auch die Zugkraft einlernen. Deshalb entwickelten die Forscher ein instrumentiertes Werkzeug bei dem beides gemessen wird: wie der Mensch das Seil führt und wie viel Kraft er dabei aufwendet. Der Roboter ahmt dann den gesamten Prozess mithilfe eines baugleichen Werkzeugs nach.
Diese Form von Automatisieren ist generell auf viele industrielle Prozesse anwendbar. Allerdings müsse man sich anschauen, ob das immer der richtige Weg sei, so Kugi. Dabei gilt es, die Stärken von Mensch und Maschine sowie sämtliche verfügbare Daten von Sensoren und Modellen aus rechnerunterstützter Konstruktion bestmöglich einzusetzen.
Auch interessant: Sami Haddadin sieht im Roboter den Gehilfen des Menschen

