


Robots kunnen al verbazingwekkend veel. Ze lopen, dansen en dragen zware lasten. Maar als het gaat om het automatiseren van taken die handigheid en gevoeligheid vereisen, falen ze nog steeds jammerlijk. Bijzonder problematisch is de verwerking van zachte materialen. Bijvoorbeeld kleeffolie, leer of technisch textiel. Dit zijn materialen die veel in de automobielindustrie worden gebruikt. Of in de staalindustrie voor het aanbrengen van dunne metaalfolies.
“Bij automatisering gaat het ook altijd om inzicht in de situatie. Mensen hebben dit begrip. Maar een machine heeft dit meestal niet,” legt professor Andreas Kugi uit. Hij is hoogleraar aan het Instituts für Automatisierungs- und Regelungstechnik an der TU Wien en hoofd van het Center for Vision, Automation and Control aan het AIT.
Rimpels gladstrijken
Wanneer iemand bijvoorbeeld een rimpel in een textiel ziet, weet hij precies wat hij met zijn handen moet doen om die glad te strijken. Hij coördineert moeiteloos inzicht met handigheid en kan zich aanpassen aan verschillende materialen, vormen en structuren. Robots zijn nog ver verwijderd van deze menselijke vermogens. Dit blijkt bijvoorbeeld uit experimenten waarbij robots de taak krijgen een T-shirt snel en kreukvrij op te vouwen.
Het onderzoek van Kugi en zijn is niet gericht op massaproductie, maar op de zeer flexibele productie van kleine hoeveelheden. Het gaat hen om de automatisering van specifieke taken die snel kunnen worden aangeleerd en aangepast aan soortgelijke taken.

Ook interessant: Over hypes en gemiste kansen in de robotica.
Zachte, vervormbare materialen
In samenwerking met industriële partners hebben zij reeds de eerste successen geboekt. Zij slaagden erin een 3D-haasje precies langs de aangegeven paden te lijmen met rechte en gebogen stroken zonder rimpels. Het 3D-haasje werd gekozen als representatief voor een vrijgevormd driedimensionaal object. Een dergelijk voorwerp heeft krommingen in alle ruimtelijke richtingen, zoals een waskom, een turbineblad, een schoen, en dergelijke.
De uitdaging was de robot zo langs het gebogen oppervlak te bewegen, dat alle punten op het pad worden bereikt zonder dat het gereedschap om zijn verticale as draait. Een dergelijke draaiing zou leiden tot het kreukelen van de kleefstrook. Het basisonderzoek hiervoor werd verricht door het team van de Technische Universiteit van Wenen. De oplossing van het probleem werd geboden door een nieuwe, op oppervlakte gebaseerde trajectcontrole, die in deze vorm nog niet bestond.
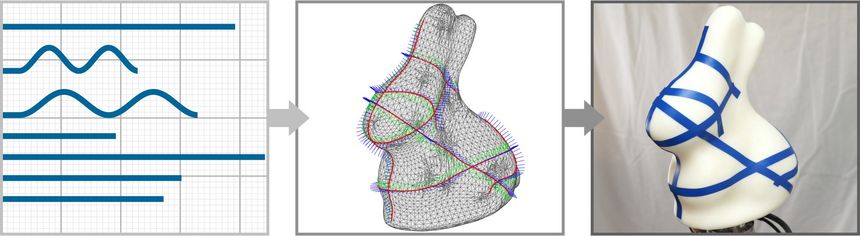
Voor deze opdracht zetten de onderzoekers een 7-assige robot in. De stroken waren bevestigd op een rol die vast was gemonteerd. De 7-assige robot leidde de haas met al zijn krommingen in de driedimensionale ruimte doelgericht langs de afwikkelrol.
Kijk via deze links naar de video’s hierover: https://www.acin.tuwien.ac.at/52f5/
https://doi.org/10.1109/TRO.2020.3033721
Deze vorm van automatisering vergt van de robot een aantal verschillende vaardigheden. Afhankelijk van de grootte en de vorm van het voorwerp, moeten de bewegingen ervan voortdurend worden aangepast. De krachten die op het contactpunt tangentiaal en orthogonaal op het oppervlak moeten worden uitgeoefend, moeten specifiek worden afgesteld. Hierbij werken de onderzoeksteams met verschillende sensorconcepten, waaronder krachtsensoren en camerasystemen. De keuze van de juiste sensortechnologie en de fusie van sensorgegevens spelen een beslissende rol
Automatiseringsarchitectuur
Om deze flexibiliteit te bereiken, moet een geschikte automatiseringsarchitectuur worden ontworpen. Ondergeschikte regelkringen maken zeer eenvoudige en zeer flexibele bewegingsplanning mogelijk langs het oppervlak van vrij gevormde driedimensionale objecten. Afhankelijk van de taak kunnen specifieke toleranties worden gespecificeerd in de verschillende ruimtelijke richtingen (tangentieel) en loodrecht (orthogonaal) op het oppervlak. In contact met het oppervlak kan ook het gewenste stijfheidsgedrag worden ingesteld.

„Wanneer wij bijvoorbeeld het spuiten van oppervlakken automatiseren, kunnen wij niet alleen de afstand van de sproeikop tot het oppervlak specificeren, maar ook de hoek van de sproeikop, met inbegrip van de toegestane toleranties ten opzichte van het oppervlak, om een zo homogeen mogelijke spuitlaag op het driedimensionale oppervlak te verkrijgen.”
Professor Andreas Kugi
Cognitieve lagen
De onderzoeksteams werken momenteel aan de buitenste, cognitieve laag van de automatiseringsarchitectuur. Dit moet het mogelijk maken om twee dingen specifiek te leren:
- de afstand en hoeken van het gereedschap ten opzichte van het oppervlak;
- de contactstijfheid bj de desbetreffende toepassing.
Hierdoor kunnen de gewenste bewerkingstaken zo goed mogelijk worden uitgevoerd. Wanneer de robot een bepaald aantal onderdelen heeft bewerkt, heeft hij daar zoveel van geleerd dat hij dit bewerkingsproces kan toepassen op een nieuw onderdeel dat hij nog nooit heeft gezien.
Voordoen in plaats van programmeren
Niet alle taken kunnen door machines alleen worden uitgevoerd. Daarom werken de onderzoeksteams ook aan methoden om mens en machine beter te laten samenwerken.
„Als flexibiliteit vereist is, rijst de vraag hoe de machine zo snel mogelijk kan worden geleerd wat hij moet doen. Een mogelijke variant is dat de robot ‘de mens om hulp vraagt’ wanneer hij bepaalde taken niet alleen kan uitvoeren.“
Professor Andreas Kugi
Bij kinesthetisch leren kan de robot gewoon de taak worden voorgedaan. In dit geval wordt de robot langs het oppervlak geleid om hem virtueel te laten zien wat hij moet doen. Maar voor meer complexe taken op oppervlakken van 3D-objecten kan dit erg vervelend worden. De onderzoekers werken daarom aan het idee om nieuwe taken te demonstreren met zogenaamde ‘geïnstrumenteerde instrumenten’. Want als de robot hetzelfde gereedschap gebruikt als de mens, kunnen de bewegings- en krachtcurven heel gemakkelijk op de robot worden overgebracht.
Een touw oprollen
In één project bijvoorbeeld gaf het onderzoeksteam de robot de opdracht een touw op te rollen. Het is niet voldoende om alleen de positie in de ruimte te specificeren. Ook de trekkracht moet worden aangegeven. De onderzoekers ontwikkelden daarom een ‘instrument met instrumenten’ waarin beide worden gemeten: hoe de mens het touw leidt en hoeveel kracht er wordt uitgeoefend.
De robot imiteert dan het hele proces met behulp van een identiek werktuig. Deze vorm van automatisering is algemeen toepasbaar op tal van industriële processen. Het is echter belangrijk om na te gaan of dit altijd de juiste aanpak is, zegt Kugi. Het doel is optimaal gebruik te maken van de sterke punten van mens en machine, alsmede van alle beschikbare gegevens van sensoren en modellen van computerondersteund ontwerpen.
Ook interessant: Met robots meer gelijke kansen voor iedereen
Als je dit artikel leuk vindt, lees dan ook:





