

Ein kleiner Roboter soll in Zukunft für mehr Sauberkeit im Wasser sorgen. Pate stand ein Meerestier: der Korallenpolyp, aus dessen Tentakeln die Korallen im Ozean bestehen. Der mechanische „kabellose Wasserpolyp” soll Schadstoffpartikel aus seiner Umgebung anziehen und einfangen. Außerdem soll er Zellen zur Analyse in Diagnosegeräten aufnehmen und transportieren.
„Ich wurde von der Bewegung dieser Korallenpolypen inspiriert, insbesondere von ihrer Fähigkeit, durch selbst erzeugte Strömungen mit der Umwelt zu interagieren“, sagt Marina Pilz Da Cunha, Doktorandin an der TU Eindhoven. Die Funktionsweise des künstlichen Polypen gleicht der des lebendigen Vorbilds. Der Stamm der lebenden Polypen macht eine bestimmte Bewegung, die eine Strömung erzeugt, die Nahrungspartikel anzieht. Die Tentakeln greifen die vorbeischwimmenden Nahrungspartikel dann.
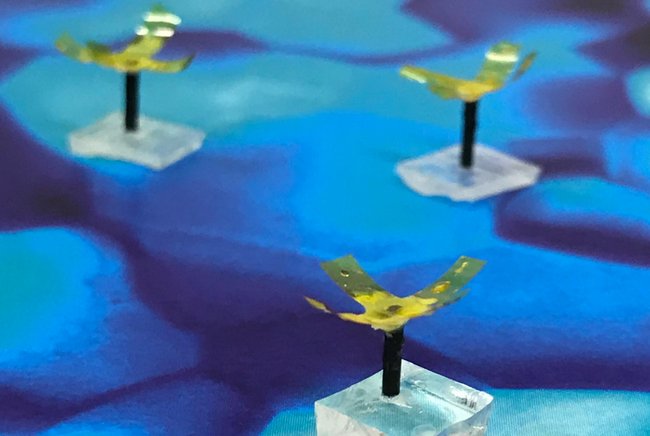
Der 1 x 1 cm große mechanische Polyp hat ebenfalls einen Stamm. Der reagiert auf Magnetismus, die Tentakeln auf Licht. „Die Kombination von zwei verschiedenen Reizen ist selten, da sie eine delikate Materialvorbereitung und Montage erfordert, aber sie ist für die Herstellung von nicht kabellosen Robotern interessant, da sie komplexe Formveränderungen und Aufgaben ermöglicht”, erklärt Pilz Da Cunha. Die Tentakeln würden sich bewegen, indem man sie mit Licht bestrahlt. Dabei würden unterschiedliche Wellenlängen zu unterschiedlichen Ergebnissen führen. Unter UV-Licht greifen die Tentakeln beispielsweise zu, unter blauem Licht lassen sie los.
Vom Land ins Wasser
Ein landgestützter Roboter, wie er zu Beginn des Jahres vorgestellt wurde, könnte diese Aufgaben unter Wasser nicht ausführen, da die Polymere, aus denen er besteht, durch fotothermische Effekte funktionierten, erklärt die Wissenschaftlerin. „Die Wärme zerstreut sich im Wasser, was es unmöglich macht, den Roboter unter Wasser zu steuern”, sagt sie. Deshalb habe sie ein photomechanisches Polymermaterial entwickelt, das auf Licht reagiert, nicht auf Wärme. So kann sich der Roboter unter Wasser bewegen. Im Süßwasser ebenso wie im Salzwasser. „Unser Roboter arbeitet in gleicher Weise in Salzwasser oder in Wasser mit Schadstoffen. Tatsächlich könnte der Polyp in Zukunft in der Lage sein, Schadstoffe aus dem Wasser herauszufiltern, indem er sie mit seinen Tentakeln auffängt.“
Außerdem behält das neue Material auch nach seiner Aktivierung durch Licht seine Verformung bei. Während das fotothermische Material ohne zugeführte Wärme sofort wieder in seine ursprüngliche Form zurückkehre, würden die Moleküle im photomechanischen Material tatsächlich einen neuen Zustand annehmen. Dadurch könnten die Tentakeln verschiedene stabile Formen über einen längeren Zeitraum beibehalten. „Das hilft bei der Steuerung des Greifarms; wenn etwas einmal erfasst wurde, kann der Roboter es so lange halten, bis es erneut mit Licht angesprochen wird, um es wieder freizugeben”, sagt Pilz Da Cunha.
Strömung zieht Partikel an
Ein rotierender Magnet unter dem Roboter lässt den Stamm um seine eigene Achse kreisen. “So war es möglich, schwimmende Objekte im Wasser tatsächlich in Richtung des Polypen zu bewegen, in unserem Fall Öltröpfchen,” so Pilz Da Cunha. Weiter habe sich herausgestellt, dass die Position der Tentakeln (offen, geschlossen oder etwas dazwischen) einen Einfluss auf den Flüssigkeitsstrom habe. „Computersimulationen mit verschiedenen Tentakelpositionen halfen uns schließlich, die Bewegung des Stamms genau zu verstehen und genau zu steuern. Und die Öltröpfchen zu den Tentakeln ‚anzuziehen’.”

Aktuell arbeitet Pilz Da Cunha am nächsten Schritt: an einer Reihe von Polypen, die zusammenarbeiten können und so einen Teilchentransport ermöglichen, indem sie die Partikel einander weitergeben. Und: Ein schwimmender Roboter für biomedizinische Anwendungen soll nach Möglichkeit irgendwann bestimmte Zellen einfangen können. Dazu müssten sie aber erst noch an den Wellenlängen arbeiten, auf die das Material reagiert, sagt Pilz Da Cunha. „UV-Licht wirkt auf Zellen, und die Eindringtiefe in den menschlichen Körper ist begrenzt. Darüber hinaus könnte UV-Licht den Roboter selbst beschädigen, wodurch er weniger langlebig wird. Deshalb wollen wir einen Roboter schaffen, der kein UV-Licht als Stimulans braucht.“
Die Ergebnisse der Forschung wurden in der Zeitschrift PNAS veröffentlicht. Sie wurde an der Fakultät für Chemieingenieurwesen und Chemie und am Institut für komplexe molekulare Systeme der Universität und Technologie Eindhoven durchgeführt.