
In geval van nood moet actuele informatie over de binnenkant van gebouwen direct beschikbaar zijn voor hulpverleners. UT-onderzoeker Samer Karam ontwikkelde een mobilemappingsysteem (de ITC-Backpack) dat binnen enkele minuten het interieur van gebouwen in kaart kan brengen, schrijft Universiteit Twente in een persbericht.
Veel grote openbare gebouwen kunnen behoorlijk complex zijn om nauwkeurig in kaart te brengen. Plattegronden (2D-kaarten) geven alleen de belangrijkste informatie weer en kunnen in complexe gebouwen een warboel worden. Ze zijn dan al snel moeilijk te lezen. Tot overmaat van ramp zijn deze kaarten na elke verbouwing of renovatie verouderd. In geval van nood is het belangrijk om in één oogopslag de huidige situatie te begrijpen. Indoor 3D-kaarten kunnen de oplossing zijn.
De verspreiding van COVID-19 heeft het bewustzijn over het belang van 3D-kartering van binnenruimtes vergroot. Digitale kaarten van binnenruimtes kunnen helpen om afstand te bewaren, virtueel toerisme mogelijk te maken en beslissingen te nemen over onroerend goed zonder dat daarvoor iemand fysiek naar de locatie moet.
3D-kartering van binnenruimtes
Traditionele karteringsmethoden zijn afhankelijk van niet-verplaatsbare apparatuur, zoals laserscanners, die veel tijd nodig hebben en duur zijn. De apparatuur moet op veel verschillende posities worden opgesteld. Zo kan een nauwkeurige 3D-scan uren duren. UT-onderzoeker Samer Karam ontwikkelde voor zijn promotie de ITC-Backpack, een draagbaar mobilemappingsysteem dat snel en gedetailleerd het interieur van gebouwen kan digitaliseren.

ITC-backpack
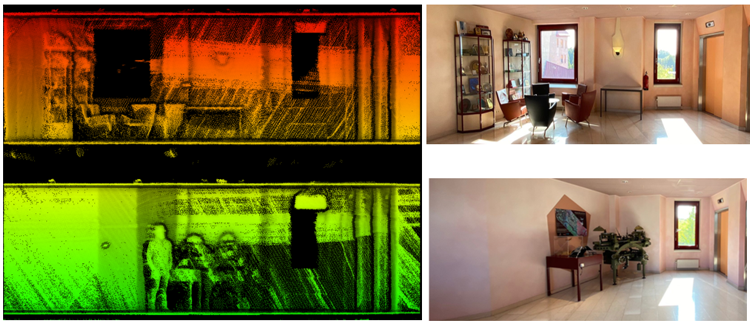
Het systeem bestaat uit drie 2D lichtdetectie- en afstandscanners (LIDAR) en een traagheidsmeeteenheid (IMU). De LIDAR-scanners leveren laserpunten. “Ze registreren punten op de omringende muren, het plafond en de vloer”, legt Karam uit. De IMU meet de versnellingen en hoeksnelheden van de rugzak door de tijd. Deze gegevens worden gebruikt om de veranderingen in houding te schatten. Omdat wereldwijde navigatiesatellietsystemen (GNSS’s) niet werken binnen gebouwen, maakt de ITC-rugzak gebruik van een algoritme voor het zogenaamde ‘Simultaneous Localization And Mapping’ (SLAM), ontwikkeld tijdens het onderzoekstraject van Karam. “Het is het op LIDAR en IMU gebaseerde SLAM dat uitgaat van vlakke structuren in de indoor gebouwde omgeving,” legt hij uit.
Lussen sluiten
Het maken van een 3D-kaart uit deze 2D-datapunten bleek lastig. “De sensorruis, fouten in de pose-schatting en de complexiteit van sommige gebouwen resulteren na verloop van tijd in een afwijking,” zegt Karam. “Toen ik in het ITC-gebouw rond de eerste verdieping liep en terugkwam op de startplaats, dupliceerde het systeem de muren van de gang met deze afwijking. Om dit op te lossen heb ik een specifieke techniek ontwikkeld die ervoor zorgt dat het rugzaksysteem de eerder bezochte plaatsen herkent, de afwijking corrigeert en daarmee de gelopen lus sluit.”
Testen van het systeem
De rugzak werd getest in verschillende openbare binnenomgevingen met verschillende niveaus van complexiteit. Karam testte de ITC-Backpack in het gebouw van het Instituut voor Geodesy and Photogrammetry van de Universiteit van Braunschweig in Duitsland, het gebouw van de brandweer in Haaksbergen en verschillende gebouwen van de Universiteit Twente. “Ik heb het systeem zelfs gevalideerd in de hal waar ik mijn proefschrift heb verdedigd”, aldus Karam.
Ook interessant: Brainport is bakermat van de navigatie en digitale kaarten
Geselecteerd voor jou!
Innovation Origins is het Europese platform voor innovatienieuws. Naast de vele berichten van onze eigen redactie in 15 Europese landen, selecteren wij voor jou de belangrijkste persberichten van betrouwbare bronnen. Zo blijf je op de hoogte van alles wat er gebeurt in de wereld van innovatie. Ben jij of ken jij een organisatie die niet in onze lijst met geselecteerde bronnen mag ontbreken? Meld je dan bij onze redactie.
Als je dit artikel leuk vindt, lees dan ook:





