
Das menschliche Gehirn funktioniert anders als ein Computer. Während das Gehirn mit biologischen Zellen und elektrischen Impulsen arbeitet, verwendet ein Computer Transistoren auf Siliziumbasis. Ein Wissenschaftlerteam um Paschalis Gkoupidenis, Gruppenleiter am Max-Planck-Institut für Polymerforschung, hat nun in einer groß angelegten Forschungskooperation die beiden Welten miteinander verbunden.
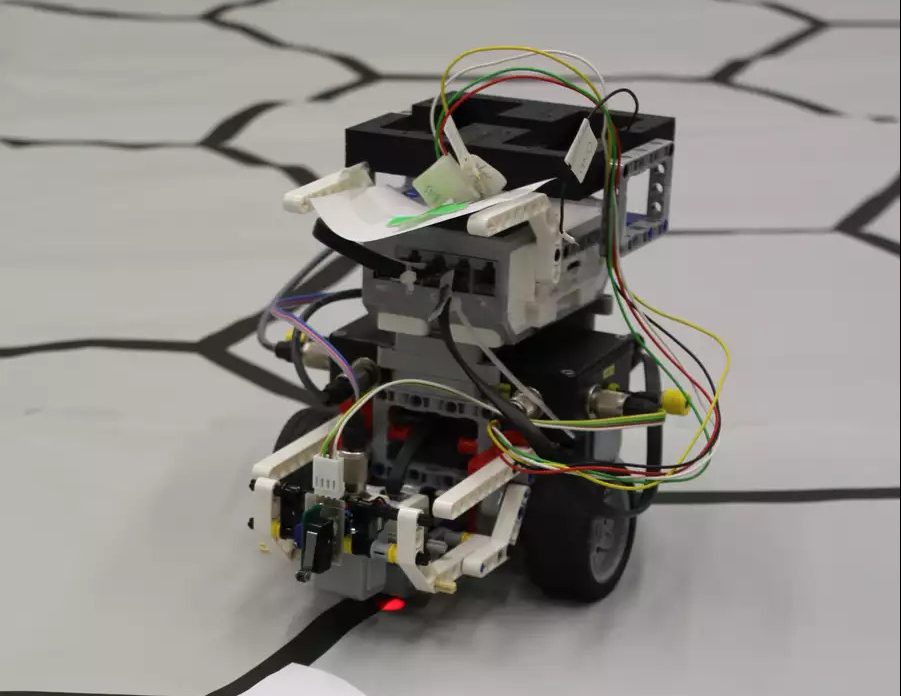
Sie haben einen Spielzeugroboter mit einem intelligenten und anpassungsfähigen elektrischen Schaltkreis ausgestattet, der aus weichen organischen Materialien besteht, ähnlich wie die biologische Materie, so die Max-Planck Gesellschaft in einer Pressemeldung. Mit diesem bio-inspirierten Ansatz konnten sie dem Roboter beibringen, selbstständig durch ein Labyrinth zu navigieren und sich dabei an visuellen Zeichen zu orientieren.
Der Prozessor ist das Gehirn eines Computers. Aber Prozessoren arbeiten grundlegend anders als das menschliche Gehirn. Transistoren führen logische Operationen mit Hilfe von elektronischen Signalen durch. Im Gegensatz dazu arbeitet das Gehirn mit Nervenzellen, so genannten Neuronen, die über biologische Leiterbahnen, so genannte Synapsen, verbunden sind. Auf einer höheren Ebene werden diese Signale vom Gehirn genutzt, um den Körper zu steuern und die Umgebung wahrzunehmen.
Lernprozess
Die Reaktion des Körper-Gehirn-Systems auf die Wahrnehmung bestimmter Reize – zum Beispiel über Augen, Ohren oder Tastsinn – wird durch einen Lernprozess ausgelöst. Kinder lernen zum Beispiel, nicht zweimal auf eine heiße Herdplatte zu greifen: Ein Eingangsreiz führt zu einem Lernprozess mit einem klaren Verhaltensergebnis.
Wissenschaftlerinnen und Wissenschaftler um Paschalis Gkoupidenis, Gruppenleiter im Arbeitskreis von Paul Blom am Max-Planck-Institut für Polymerforschung, haben dieses Grundprinzip des Lernens durch Erfahrung nun in vereinfachter Form angewandt und einen Roboter mit Hilfe eines sogenannten organischen neuromorphen Schaltkreises durch ein Labyrinth gesteuert. Die Arbeit war eine umfangreiche Zusammenarbeit zwischen den Universitäten Eindhoven, Stanford, Brescia, Oxford und KAUST.
Organische neuromorphe Geräte
“Wir wollten mit diesem einfachen Aufbau zeigen, wie leistungsfähig solche ‘organischen neuromorphen Geräte’ unter realen Bedingungen sein können”, sagt Imke Krauhausen, Doktorandin in Gkoupidenis’ Gruppe und an der TU Eindhoven (van de Burgt-Gruppe) sowie Erstautorin der wissenschaftlichen Arbeit.
Um die Navigation des Roboters innerhalb des Labyrinths zu ermöglichen, fütterten die Forscher den intelligenten adaptiven Schaltkreis mit sensorischen Signalen aus der Umgebung. Der Weg des Labyrinths zum Ausgang wird an jeder Labyrinthkreuzung visuell angezeigt. Anfangs interpretiert der Roboter die visuellen Zeichen oft falsch, so dass er an den Kreuzungen des Labyrinths falsche “Abbiege”-Entscheidungen trifft und den Weg nach draußen nicht findet. Wenn der Roboter diese Entscheidungen trifft und in Sackgassen fährt, wird er durch korrigierende Reize davon abgehalten, diese falschen Entscheidungen nochmals zu treffen.
Weg aus dem Labyrinth
Die korrigierenden Reize, z. B. wenn der Roboter gegen eine Wand stößt, werden über elektrische Signale, die von einem am Roboter angebrachten Berührungssensor ausgelöst werden, direkt auf den organischen Schaltkreis übertragen. Mit jeder weiteren Ausführung des Experiments lernt der Roboter allmählich, an den Kreuzungen die richtigen “Wende”-Entscheidungen zu treffen, d. h. die Korrekturreize zu vermeiden, und findet nach einigen Versuchen den Weg aus dem Labyrinth. Dieser Lernprozess findet ausschließlich auf dem organischen adaptiven Schaltkreis statt.
“Wir waren glücklich zu sehen, dass der Roboter nach einigen Durchläufen durch das Labyrinth fahren kann, indem er auf einem einfachen organischen Schaltkreis lernt. Wir haben hier einen ersten, sehr einfachen Aufbau gezeigt. Wir hoffen jedoch, dass in ferner Zukunft organische neuromorphe Geräte auch für lokales und verteiltes Rechnen/Lernen eingesetzt werden können. Dies wird völlig neue Möglichkeiten für Anwendungen in der realen Welt der Robotik, der Mensch-Maschine-Schnittstellen und der Point-of-Care-Diagnostik eröffnen. Es ist zu erwarten, dass auch neuartige Plattformen für das Rapid Prototyping und die Ausbildung an der Schnittstelle von Materialwissenschaft und Robotik entstehen werden”, sagt Gkoupidenis.
Die Wissenschaftler haben ihr Experiment nun in der renommierten Fachzeitschrift Science Advances veröffentlicht.
Auch interessant: Umweltfreundliche Straßenbeläge mit Hilfe von Robotern und Bindfäden
Für Sie ausgewählt!
Innovation Origins ist die europäische Plattform für Innovationsnachrichten. Neben den vielen Berichten unserer eigenen Redakteure aus 15 europäischen Ländern wählen wir die wichtigsten Pressemitteilungen aus zuverlässigen Quellen aus. So bleiben Sie auf dem Laufenden, was in der Welt der Innovation passiert. Kennen Sie eine Organisation, die in unserer Liste ausgewählter Quellen nicht fehlen darf? Dann melden Sie sich bei unserem Redaktionsteam.
Related Posts:





