


Zijn bachelor en master aan de Technische Universiteit Eindhoven haalde hij cum laude, dus het promotieonderzoek van Marvin Raaijmakers moest wel iets bijzonders worden. Hij ging ervoor naar Audi in Duitsland, waar hij vanuit de TU/e-afdeling Mathematics and Computer Science jarenlang onderzoek deed naar manieren om de omgeving van een autonoom rijdende auto beter in kaart te brengen. Raaijmakers keek vooral naar één lastig obstakel op dat terrein: rotondes.

Hoe gek dat ook mag klinken, er was tot voor kort nog geen goed onderzoek gedaan naar het overwinnen van dat obstakel. Dat maakt de studie van Raaijmakers des te belangrijker.

In samenwerking met Audi-onderzoekers heeft Raaijmakers gewerkt aan het verbeteren van de techniek om de omgeving van de auto beter in beeld te krijgen. Zijn onderzoek begon met het verbeteren van de observaties uit de sensoren. Autonoom rijdende auto’s gebruiken die sensorgegevens niet alleen om de infrastructuur rond het voertuig te observeren, maar ook om het vervolg van de weg te voorspellen.
Raaijmakers ontwikkelde daarvoor een nieuwe methode, gebaseerd op verschillende hypotheses voor het weergeven van het wegdeel dat nog moet komen. Het idee achter dit model is dat het rijgedrag van een autonome auto niet gebaseerd is op de meest waarschijnlijke hypothese over hoe de weg verder gaat, maar op een verzameling van alle aannemelijke hypotheses, waaronder de mate van zekerheid van deze hypothesen. Dit biedt een veel sterker informatiefundament over de weg waarop de auto rijdt, waardoor een veiligere keuze wordt gemaakt over zijn positie op de weg.
(tekst gaat onder de illustraties verder)



Dit alles moet dan weer gecombineerd worden met de meest gedetailleerde gegevens op de digitale landkaart. Om autonoom over een rotonde te kunnen rijden, moet die auto de geometrie van de rotonde exact kennen. Daarvoor heeft Raaijmakers een algoritme ontwikkeld voor een systeem dat de afmetingen en de positie het centrale eiland van de rotonde kan bepalen.
De volledig nauwkeurige oplossing heeft Raaijmakers ook nog niet gevonden, maar zijn studie brengt het onderzoek wel weer een grote stap verder. Tot nu toe had niemand gekeken naar een geautomatiseerde verificatie van de juistheid van kaartgegevens. In zijn proefschrift besteed Raaijmakers daarom veel aandacht aan dit onderwerp.
Raaijmakers’ algoritme kan niet direct in productie worden genomen. Omdat er zoveel verschillende rondes zijn, kan de ontwikkelde techniek nog niet elke rotonde goed herkennen. Wel heeft Raaijmakers nu bewezen dat volledig autonoom rijden op rotonde mogelijk is met behulp van een combinatie van sensor- en kaartgegevens.

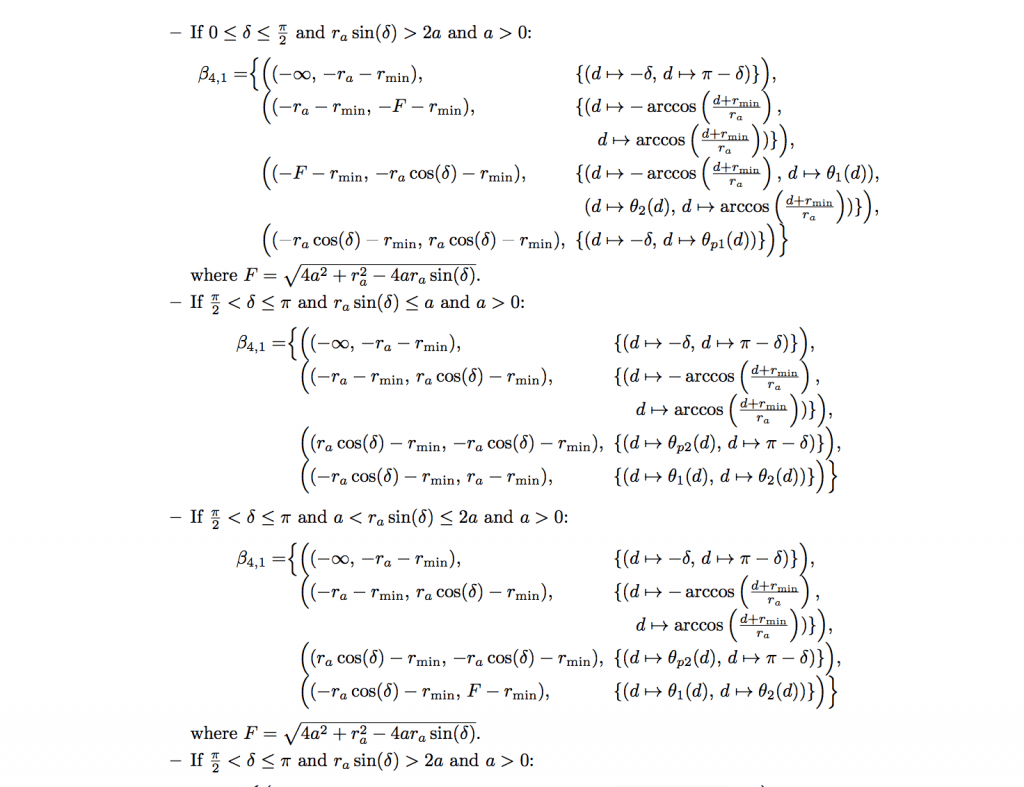
Uit het proefschrift, een deel van de onderbouwing voor het algoritme
(alle illustraties uit het proefschrift)
Als je dit artikel leuk vindt, lees dan ook:





