
For the first time, researchers at the University of Twente managed to get two micro-robots to work together to pick up, move and assemble objects in 3D environments, says the university in a press release. This breakthrough opens up new possibilities for promising biomedical applications.
- Breakthrough: Making two microrobots work together in 3D environments for biomedical capabilities
- The magnetic microrobots promise groundbreaking applications.
Imagine you need an operation somewhere in your body, but the part is impossible for a surgeon to reach. In the future, a pair of robots smaller than a grain of salt might operate on your body. These micro-robots will then work together to perform all kinds of complex tasks. “It’s almost magic,” says Franco Piñan Basualdo, author of the publication.
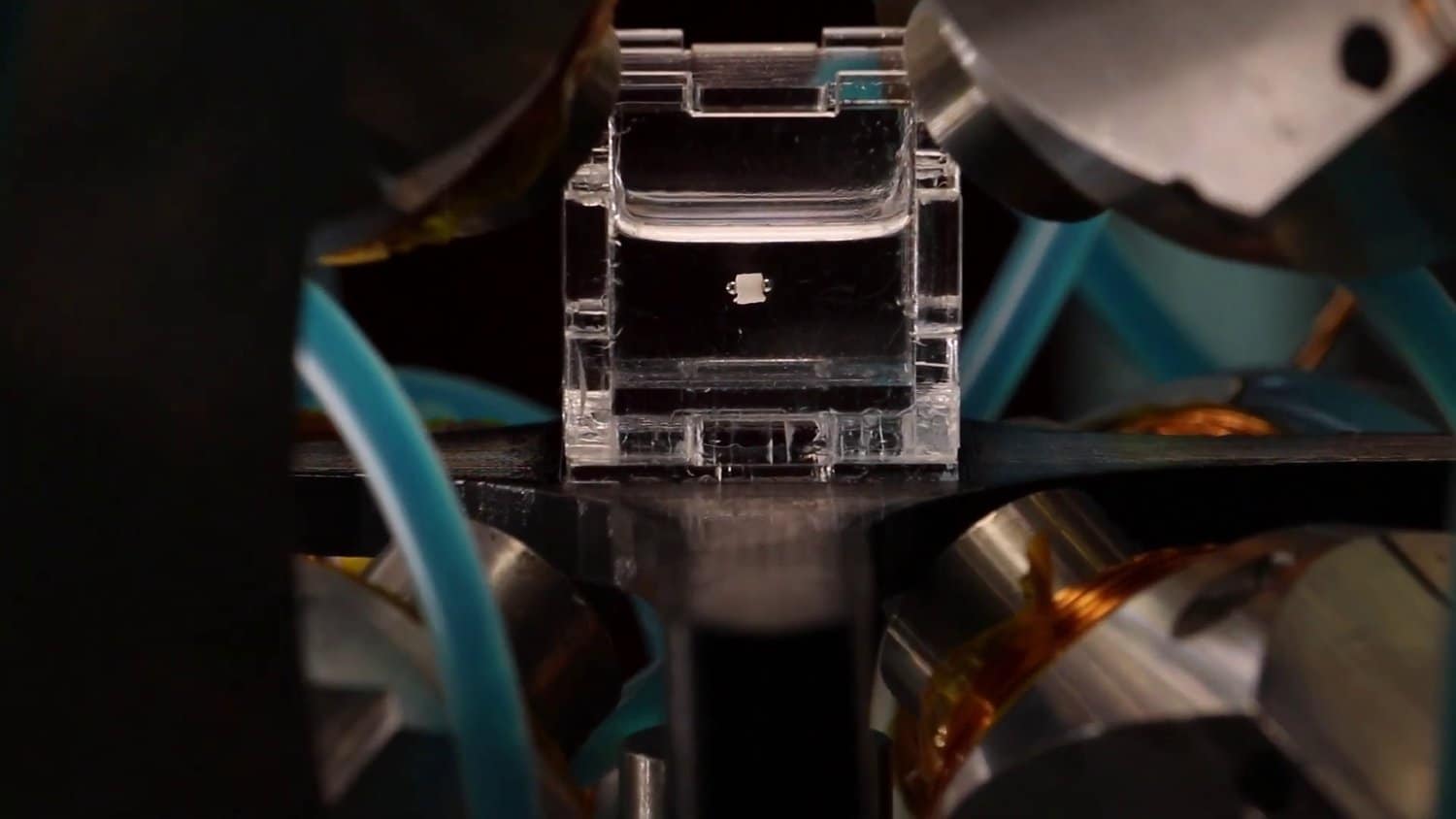
Researchers at the University of Twente successfully had two of these one-millimetre-sized magnetic microrobots perform different actions. Like a well-oiled machine, the microrobots picked up, moved or stacked small cubes. Unique to this achievement is the 3D environment in which the robots did this. Not only up, down and from left to right, but also from front to back.
Controlling magnetic robots
Getting this done was quite a challenge. Just as ordinary magnets stick together if they get too close, these little magnetic robots do the same. This means they can’t get too close together, or they’ll stick together. But researchers at the Surgical Robotics Laboratory managed to use this natural attraction to their advantage. Using a custom-made controller, the team could move the individual robots, as well as control how they reacted to each other.
The microrobots are biocompatible, meaning it does not cause harmful reactions in the human body. They can be controlled in hard-to-reach and even enclosed environments. This makes them promising for biomedical studies and applications. “We can manipulate biomedical samples remotely without contaminating them. This can improve existing procedures and open the door to new ones,” says Piñan Basualdo.
Related Posts





