

Heb je ooit geprobeerd helemaal stil te staan als je favoriete liedje opkomt? Het is moeilijk om je lichaam niet te bewegen bij een aanstekelijk deuntje. Sterker nog; een goede beat horen en stilstaan, is zo moeilijk dat er veel wetenschappelijk onderzoek naar gedaan is. Zo ook het onderzoeksproject van postdoc Alexander Szorkovszky, die onderzoekt of muziek kan worden gebruikt om robots op de maat te laten bewegen.

“Een belangrijk aandachtspunt in ons onderzoek is de onvrijwillige en onweerstaanbare drang om te bewegen op een goede beat”, aldus de postdoc in een persbericht.
Szorkovszky werkt bij het RITMO Centre for Interdisciplinary Studies in Rhythm, Time and Motion van de Universiteit van Oslo. Hij wil uitzoeken of het mogelijk is robots te coördineren met behulp van de ritmes die in muziek te vinden zijn.
Robots verliezen controle door muziek
“De meest gebruikelijke aanpak in de robotica is om robots maximale controle en stabiliteit in hun bewegingen te geven. Maar wat gebeurt er als je deze controle opgeeft aan bijvoorbeeld muziek?” vraagt Szorkovszky zich af.
Volgens Szorkovszky kan beweging op muziek op twee verschillende manieren worden bekeken: de ene is dat muziek je letterlijk in beweging zet – je reageert passief op het ritme. De andere is dat je het ritme voorspelt en bewust in de maat beweegt. “Ik onderzoek het idee dat muziek je in beweging zet,” legt Szorkovszky uit.
Bewegingen zijn geworteld in de ruggengraat
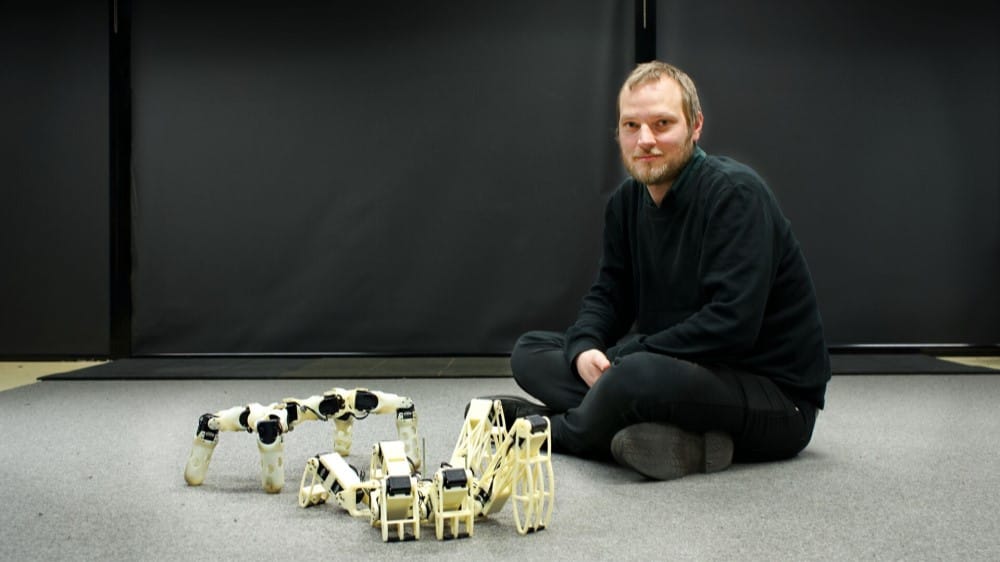
De robot van Szorkovszky is momenteel digitaal. Het scherm toont een eenvoudige robot met vier poten. In de software is de robot een passieve ontvanger van het ritme en wordt hij aangestuurd door de muziek – als hij tenminste in staat is de beat op te pikken.
“Om ervoor te zorgen dat mensen willen bewegen, moet het ritme de juiste complexiteit hebben. Het wordt saai als het ritme te eenvoudig is. Als het te complex is, wordt het moeilijk om de beat te herkennen,” legt hij uit. “Deze robot heeft momenteel niet het vermogen om verveling te ervaren, dus hij werkt goed met eenvoudige ritmes.”

De robotbesturing is geïnspireerd op neurale circuits die bekend staan als centrale patroongeneratoren. Onderzoekers geloven dat deze circuits bijdragen aan verschillende biologische ritmes, zoals het ritme van ademen of lopen. Bij de mens bevindt het circuit voor het lopen zich letterlijk in de ruggengraat. Modellen van centrale patroongeneratoren kunnen ook worden gebruikt om de bewegingen van robots met benen te besturen. Daarom kunnen robots nuttig zijn om te onderzoeken of deze circuits spontaan kunnen synchroniseren met externe stimuli, zoals het ritme van muziek.
Om de centrale patroongeneratoren te ontwikkelen maakt Szorkovszky gebruik van evolutionaire optimalisatie op een grote groep virtuele robots. Evolutie in de context van robots betekent dat uit elke generatie de robots met de beste eigenschappen worden geselecteerd om door te gaan naar de volgende. In elke generatie kunnen kleine “mutaties” of veranderingen optreden. Het algoritme combineert ook parent robots om nieuwe combinaties van eigenschappen te creëren. Op deze manier genereert het evolutionaire algoritme een verscheidenheid aan bewegingsstijlen.
Een wals of hardrock
Szorkovszky heeft verschillende soorten muziek getest. “Ik heb In the Hall of the Mountain King geprobeerd, maar die begon te langzaam,” zegt de onderzoeker met een glimlach.
De simulatie omvat momenteel slechts één vierpotige robot. Uiteindelijk wil de postdoc uitzoeken wat er gebeurt als de robot meer poten krijgt. “Ik wil proberen uit te vinden wat er gebeurt als een robot met zes poten de opdracht krijgt om een wals te dansen, zou hij dan rechtdoor gaan of rondjes lopen?
Tot nu toe heeft Szorkovszky bewezen dat het mogelijk is een robot te besturen met eenvoudige beats. Op termijn wil hij testen of robots hun bewegingen kunnen coördineren met muziek en met elkaar. Uiteindelijk gaat hij ook experimenten met fysieke prototypes. To be continued…
Als je dit artikel leuk vindt, lees dan ook:





