
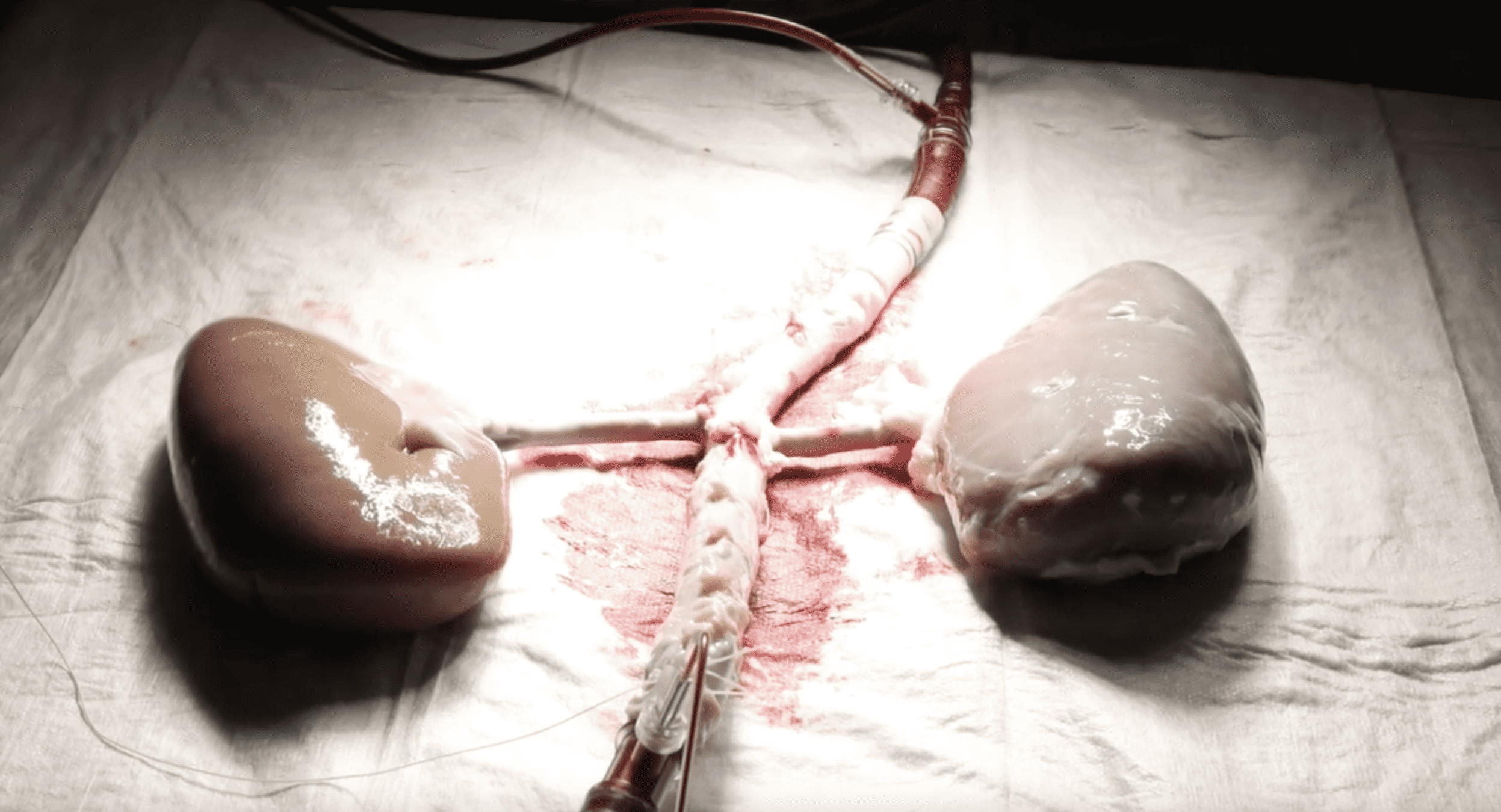
For the first time, wireless millirobots swam through a narrow blood vessel with and against the flow of blood. Using a robotically controlled rotating magnet, researchers from the University of Twente and the Radboudumc sent helical robots through a detached aorta containing kidneys. The researchers recently received a grant from Health Holland to develop further the technology for removing blood clots.
Disorders caused by blood clots result in high mortality rates. A blood clot blocks a blood vessel, preventing blood from delivering oxygen to certain body parts. Surgeons now use flexible instruments to remove the blood clot and get the blood flowing again, but some body parts are difficult to reach. With their small size, the tiny robots can reach these areas.
Collaboration in action
The researchers showed that these millirobots can travel through blood vessels. To do so, the researchers had to overcome several challenges. The millirobots must be powerful enough to get through the bloodstream and be able to swim both against the current and with the current. They must also be controlled and located very precisely. To avoid damaging blood vessels, they must be biocompatible.
The researchers used a real aorta and kidneys for their experiment at the University of Twente’s Technical Medical Center. “This required an interdisciplinary approach and cooperation between many different departments. The Robotics Lab, Laboratory of bio interface, blood lab, DesignLab, LipoCoat, and MESA+ all helped us achieve this result,” says researcher Islam Khalil.
Controlled with precision
For the experiment, the researchers used a spinning magnet controlled by a robotic arm to steer the millirobots through the blood vessel wirelessly. Using an X-ray machine, they located the millirobots as they swam through the aorta. The researchers used a maximum blood flow of 120 ml per minute in the aorta. With a stronger magnet, the millirobots could swim through a stronger current. They succeeded with one, but also with several robots at the same time.
Tiny adventurers
The robots are 3D-printed, screw-shaped objects with a small permanent magnet inside. “We placed this small magnet, only a millimeter long and a millimeter in diameter so that it can turn the ‘screw’ in both directions. This makes it possible to swim against the current and then turn around and swim back,” Khalil explains. The small size makes it possible to use multiple robots simultaneously. And the screw shape makes it possible to drill through a blood clot.
Harnessing potential
“These millirobots have enormous potential in vascular surgery,” says Michiel Warle, a vascular surgeon at Radboudumc. “Currently, we use blood thinners and flexible instruments, but a millirobot can swim to hard-to-reach arteries. This requires only minimal incisions to insert them.” In a new collaboration with Radboudumc and Triticum Medical (Israel), the researchers will further develop the millirobots to wirelessly remove blood clots. The consortium is exploring exploiting this technology to strengthen joint growth in medical robotics and engineering medicine.
In addition to removing blood clots, other applications are conceivable. “The robots can deliver drugs to very specific places in the body where the drug is most needed. That way we have minimal side effects in the rest of the body,” Khalil explained.
Related Posts





