

Snel reageren op gevaren kan voor bestuurders het verschil betekenen tussen leven en dood. Voor henzelf en voor anderen. In de regel is de reactietijd minder dan een halve seconde. Als het ook een kwestie is van uitwijken of remmen, komt er nog een seconde bij. Vooral op kruispunten, waar veel auto’s, fietsers, bussen, trams en zelfs voetgangers samenkomen, wordt een verkeerssituatie snel complex.
Onderzoekers van de Fraunhofer-instituten voor hoogfrequente fysica en radartechnieken FHR, voor geïntegreerde schakelingen IIS en het IVI-toepassingscentrum “genetwerkte mobiliteit en infrastructuur” hebben een radarsensorsysteem uitgevonden dat met behulp van kunstmatige intelligentie bestuurders en autonome voertuigen vroegtijdig waarschuwt als een voetganger in de richting van de weg en de auto loopt.
Snelheid in plats van afstand
Afstandssensoren op moderne auto’s kunnen de bestuurder waarschuwen wanneer deze te dicht bij een voorwerp komt. Bijvoorbeeld bij het parkeren. Maar als er bijvoorbeeld plotseling een kind de weg op rent, komt deze waarschuwing te laat. “In plaats van alleen te vertrouwen op afstandswaarschuwing in de auto, zoals voorheen het geval was, ligt de nadruk hier op betrouwbare gedragsvoorspelling,” legt Dr. Reinhold Herschel uit, groepsmanager bij Fraunhofer FHR.
Lees ook: Pas op voor de zelflopende voetganger
Als een persoon de weg op rent, moeten de sensoren het dreigende gevaar al bij het begin van een beweging detecteren. Dit zou waardevolle, soms zelfs levensreddende tijd besparen. De nieuwe sensoren worden eerst gebruikt bij kritieke punten, zoals bus- en tramhaltes. Zij volgen de bewegingen van de wachtende personen en geven de gegevens door aan het voorbijrijdende verkeer. Aangezien de radarsensoren geen optische beelden opnemen, vormen gegevensbescherming en privacy geen probleem, benadrukken de wetenschappers. Op lange termijn zouden de evaluatiealgoritmen ook kunnen worden gebruikt in radarsensoren in auto’s.
Alarm
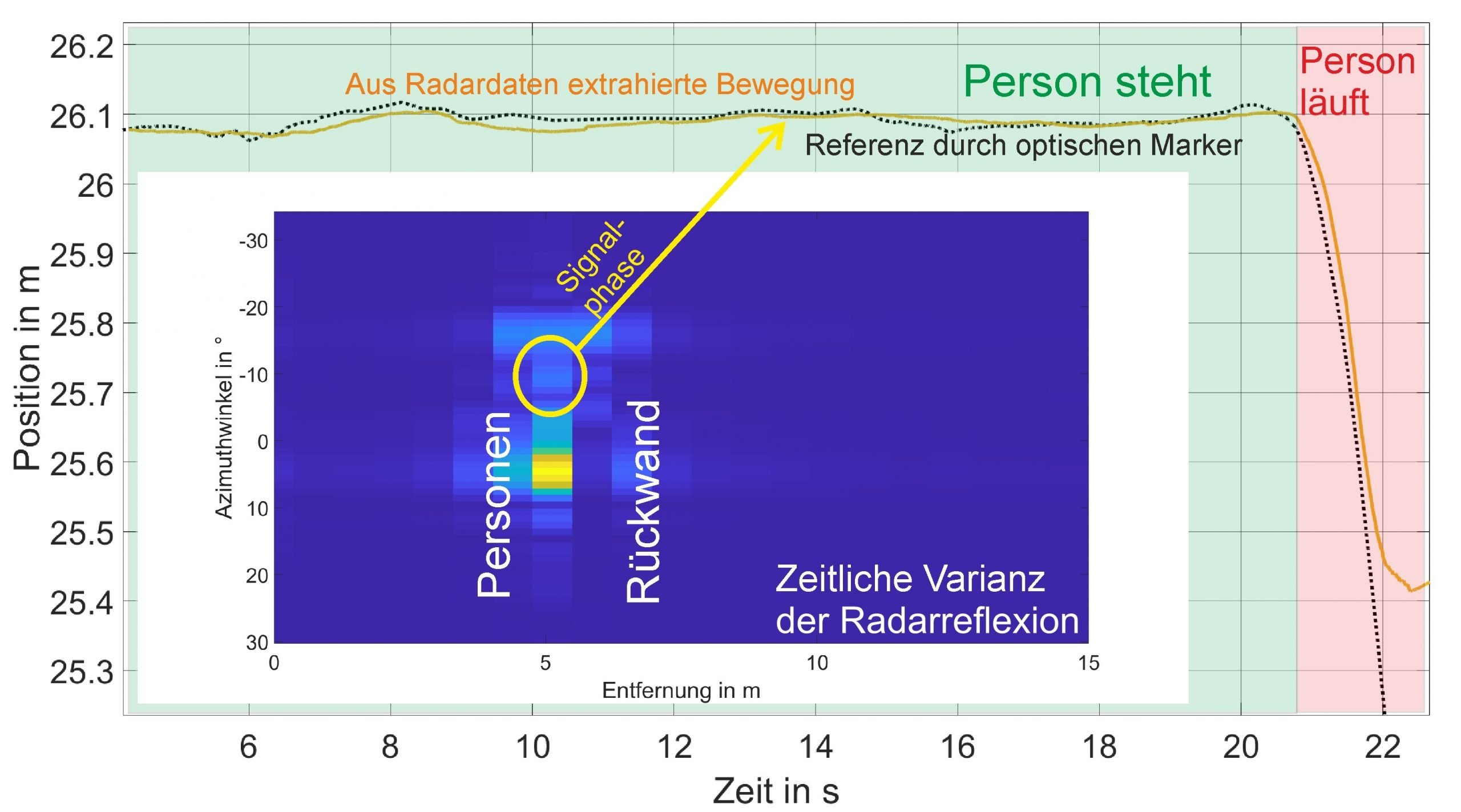
De drie Fraunhofer-instituten hebben de taken onderling verdeeld. Fraunhofer FHR ontwikkelt de algoritmen die een object als een persoon herkennen. Ze zetten een baken en bepalen de snelheid waarmee de persoon beweegt. “Loopt hij in de richting van de radarsensor en dus in de richting van de weg? De sleutel hier is het vinden van de dunne lijn tussen valse alarmen en alarmen die te laat zijn,” leggen de onderzoekers uit. De radarsensor verricht ongeveer honderd metingen per seconde. Het alarm gaat af “wanneer de persoon zich gedurende een aantal metingen consequent met een bepaalde minimumsnelheid in de richting van de weg beweegt”.

Het Fraunhofer IIS zorgt voor referentie-meettechnologie en ‘motion capture’. “Met ons L.I.N.K. Test- en Applicatiecentrum beschikken wij over unieke meetcapaciteiten. De hal is zo groot dat je er zowel een bushalte als een auto in kunt zetten,” zegt Nicolas Witt, groepsmanager bij Fraunhofer IIS. In verschillende meetsessies gebruiken de wetenschappers hier 30 camera’s voor bewegingsregistratie. Deze kunnen mensen die met kleine markers zijn gemerkt op een gebied van 20 bij 30 meter. Bij het Fraunhofer IVI worden uiteindelijk geschikte testscenario’s ontworpen.
“We hebben bijvoorbeeld twee radarsensoren geïnstalleerd in een testbushalte op de campus van de hogeschool voor toegepaste wetenschappen in Ingolstadt, die de omgeving vanuit verschillende hoeken observeren”, zegt Prof. Dr. Gordon Elger, hoofd van het toepassingscentrum. Afhankelijk van het aantal wachtenden bij de bushalte, krijgen dan bijvoorbeeld netwerkauto’s of autonoom rijdende voertuigen in de toekomst de opdracht langzamer te rijden. Als er niemand bij de bushalte staat, kan de auto er met normale snelheid langs rijden.
Demonstratie
Het demonstratiemodel werkt momenteel met maximaal acht personen. Het kan ze gelijktijdig detecteren en bepalen of ze zich in de richting van de weg bewegen. Volgens het Fraunhofer-Gesellschaft is een demonstratie gepland voor het tweede kwartaal van 2021. Als volgend project willen de onderzoekers van de drie instituten voortbouwen op de resultaten van dit project en de sensor verder optimaliseren.
Daar zou het een kwestie zijn van “hoe” in plaats van alleen “als”. Met behulp van AI en een extra infraroodcamera moet het systeem dan niet alleen zien dat iemand de auto nadert, maar ook de hele scène begrijpen. Als het systeem bijvoorbeeld een bal detecteert die de weg op rolt, moet het kunnen begrijpen dat enkele seconden later een kind zou kunnen volgen. Net als met een bus die stopt. Hier, het kan gebeuren dat iemand over de weg loopt. Dit kan de reactietijd van het systeem verbeteren en waardevolle seconden winnen om de bestuurder te waarschuwen.
Foto: Testmeting bij Fraunhofer IIS: Een persoon wordt gedetecteerd door radar voor en na het begin van het lopen, en de bepaalde positie wordt gecontroleerd via een optisch bewaakte marker op de helm.© Fraunhofer FHR
Ook interessant: Zelfrijdende auto vraagt bestuurder hulp als hij het even niet meer weet