

Ze hebben drie WK-titels meer dan het Duitse nationale voetbalteam, maar toen het B-Human team in juli arriveerde, stond er geen mensenmenigte op de luchthaven van Bremen. Het robotvoetbal wordt nog niet prime time op tv uitgezonden. Ook al zijn ze trendsetters op het gebied van programmering en testen. Een interview met Tim Laue, een van de leiders van het regerende Duitse WK-team, over de huidige uitdagingen op de RoboCup, de dingen waarin mensen nog steeds veel beter zijn dan robots en wat Robo-Football te maken heeft met autonome voertuigen.
Als je de Bundesliga vergelijkt met Robot Soccer, wat is dan de grootste uitdaging waar robots momenteel voor staan?
Oh, er zijn er veel. Het begint met rennen. Menselijke gewrichten bereiken veel hogere snelheden. Af en toe bereiken hooggespecialiseerde industriële robots die zeer specifieke dingen assembleren een dergelijk niveau. Vandaag de dag zijn mensachtige robots in staat om vele bewegingen te maken. Zo hebben onze NAO’s bijvoorbeeld zes elektromotoren per poot en dus veel vrijheidsgraden. Maar je hebt altijd een energie- en ruimteprobleem. Het is nog niet mogelijk om de extremiteiten zo fijn en reactief te bewegen als een mens. Maar dat is wat we nodig hebben om zo’n machine ongevalvrij te laten draaien of om echt hard op het doel te schieten.

Lees ook: voetbalrobots en zorgrobot van TU Eindhoven worden beide wereldkampioen in Sidney
[learn_more caption=”Huldiging robotvoetballers”] Als afsluiting van de viering van de opening van het academisch jaar zorgde wethouder Sport en Innovatie van de gemeente Eindhoven Stijn Steenbakkers vandaag voor de officiële huldiging van het TU/e studententeam Tech United. Zij werden in juli dit jaar voor de vijfde maal de wereldkampioen Robocup en pakten voor het eerst de wereldtitel in de categorie zorgrobots. Steenbakkers: “Als Eindhoven sportstad én hightechstad zijn wij supertrots. Dit team is een perfect uithangbord voor Eindhoven. Tech United laat ook goed zien hoe slim toepassen van AI tot grootse prestaties kan leiden.”[/learn_more]

In jouw competitie gebruiken alle teams hetzelfde type robot?
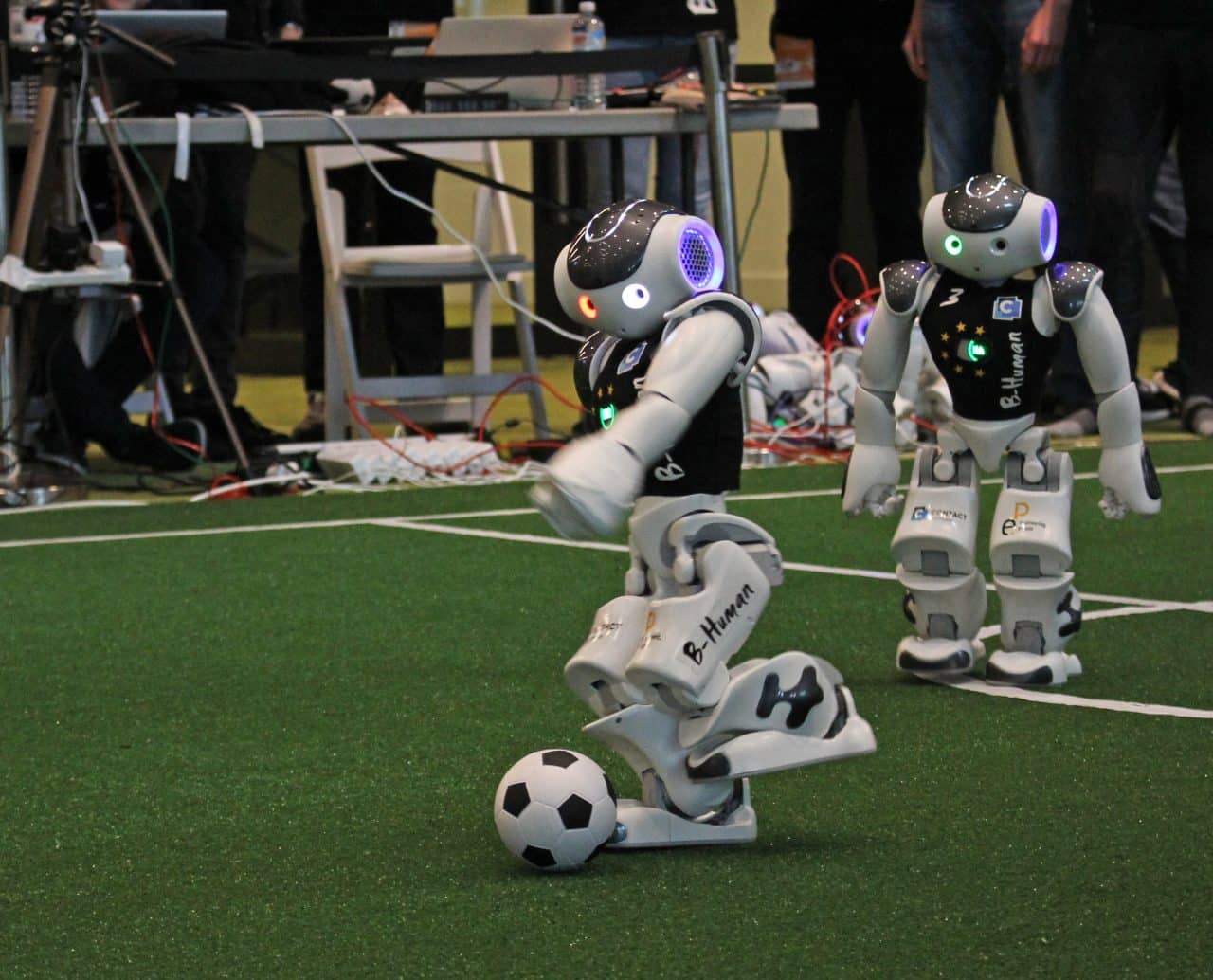
Bij de RoboCup nemen we deel aan de zogenaamde Standard Platform League (Eindhoven deed mee aan een andere categorie – red). Hier gebruikt iedereen de NAO van Softbank – ongeveer 60 cm hoog, vijf en een halve kilo zwaar. Dus wat we doen is een softwarewedstrijd die gebaseerd is op een enkel stuk hardware. Daarentegen is er de Humanoid-Adult-Size-League. Ook hier kunnen de robots 1,50 m hoog zijn en worden ze door de teams zelf gebouwd.
Zo concurreren experts uit verschillende disciplines met elkaar in de verschillende competities?
In onze klasse zijn het vooral computerwetenschappers die met elkaar concurreren, in andere vaak elektrotechnici of technici. Binnen deze disciplines is robotvoetbal echter niet erg populair in Duitsland.
Toeval?
Begin van de eeuw heeft de Duitse onderzoeksstichting specifiek robotvoetbal gepromoot. Er was een tiental werkgroepen in heel Duitsland van wetenschappers die fulltime werden betaald om robots te leren voetballen. Dit heeft de zaken op een breed front naar voren gebracht. Duitse teams werden internationaal succesvol. Naar mijn mening heeft dit ook nu nog effect.
Hoe zit het met de concurrentie?
De teams die deelnemen aan de RoboCup zijn heel verschillend. Het team uit Austin, Texas, bijvoorbeeld, zijn allemaal promovendi met een diploma. Er zijn hobbyteams of teams die op projectbasis samenkomen. Hier in Bremen is dit een officiële cursus. De studenten kunnen hier relatief veel studiepunten voor krijgen en veel tijd in investeren. Dat helpt.
Afgezien van de studiepunten, wat halen de studenten er dan uit?
Met hun ervaring gaan ze vervolgens aan de slag in domeinen zoals industriële beeldverwerking of werken ze aan autonoom bewegende auto’s.
Het een heeft iets met het ander te maken?
Wat ik zie als de RoboCup is dat het een testomgeving is voor zeer complexe software. De randvoorwaarden zijn gedefinieerd, maar we hebben geen invloed op wat het andere team doet. Om deze situatie het hoofd te bieden, putten we uit een uitgebreide pool van algoritmen, bedenken we nieuwe en testen we onder zware omstandigheden of ze samenwerken.
De machines staan er tijdens het spel helemaal alleen voor?
Inderdaad. De vijf spelers van een team doen alles in hun eentje. Het programma dat op de robots draait moet dus eerst de situatie herkennen – het speelveld, de eigen positie, de positie van de teamgenoten en tegenstanders, de doelen, de bal – en vervolgens de juiste conclusies trekken in alle spelsituaties.
Er zijn geen vooraf gedefinieerde stapvolgordes, bijvoorbeeld twee defensieve kettingen en het synchroon schakelen van de ketting?
Je kunt stapsequenties specificeren, ja. Maar dan, onder reële omstandigheden, kunnen er slechts twee en een halve stap vooruit zijn in plaats van de geplande drie, of tijdens de rotatie, kunnen er slechts 80 graden zijn in plaats van de geplande 90 graden.
Zelfs eenvoudige bewegingen kunnen niet precies door zo’n robot worden uitgevoerd?
Er kunnen afwijkingen zijn. De robot moet dit opmerken en zo nodig de rotatie corrigeren. Vele duizenden regels broncode, bijvoorbeeld, draaien om de vraag waar de robot zich precies bevindt.
Dit is triviaal voor mensen. Ik weet meteen waar ik op het speelveld ben, waar de doelen zijn, etc. Ik kan ook zien waar de robot zich op het veld bevindt. Onze robots moeten zich eerst oriënteren. Ze hebben twee videocamera’s, een in de kin en een in het voorhoofd. Er zijn 60 camerabeelden per seconde, die we allemaal willen evalueren. Dit betekent dat we elk videobeeld bekijken om te zien of er een zijlijn, een middencirkel of een strafschopgebied is. De robot berekent hiermee zijn eigen positie.
De machines gebruiken geen GPS-signaal? Dit alles gebeurt via de videogegevens die op het veld worden gegenereerd?
Precies.
Jullie team is nu zeven keer wereldkampioen geworden. Wat kunnen jullie robots beter dan de anderen?
Gemiddeld kunnen we alles beter dan onze tegenstanders. Of, om het andersom te zeggen: als onze robots een van de vele taken niet onder de knie hadden – zoals balherkenning of als ze vaker ten val kwamen dan hun concurrenten – dan zou deze fout in de loop van het spel nog verder toenemen, en dan zouden we met een grote waarschijnlijkheid verliezen. Robuuste algoritmes voor alle taken lijken ons belangrijkste concurrentievoordeel te zijn. Daarnaast worden we vaker geprezen door andere teams voor het feit dat onze vijf teams bijzonder goed samen tactisch spelen.
Dus teamwork is cruciaal bij Robo Soccer?
Absoluut. Dit jaar hebben we eigenlijk veel passen gespeeld. Om dat te doen, moet de andere speler zich in een positie plaatsen waar hij überhaupt aangespeeld kan worden. In ruil daarvoor moet de speler met de bal beslissen of hij zelf schiet, dribbelt of passt. Dit heeft voor ons in veel gevallen goed uitgepakt. Een keer gebeurde het dat de robot met de bal recht voor het doel van de tegenstander stond. In plaats van te schieten, passte hij de bal naar de volgende man.
Kijken jullie na een spel naar de gegevens en verbeteren jullie de procedures?
Elke robot registreert alles wat 60 keer per seconde gebeurt; de genomen beelden, wat er is gedetecteerd, welke beslissingen hij heeft genomen, enzovoort. Dit resulteert in enkele gigabytes aan gegevens per robot en spel. Tijdens het spel registreren we de tijden dat er iets stoms gebeurt en kijken we wat er later gebeurt.
Laten we het bij de onzinnige pass houden. Wat was de reden?
In het concrete geval bleek uit de berekening dat de directe weg naar de poort niet vrij was. Dit kan zijn omdat de robot een tweede tegenstander herkende die er niet eens was. Laten we zeggen dat het een tegenstander herkent, wegkijkt om de bal te lokaliseren, terugkijkt en een tweede tegenstander herkent – die eigenlijk de eerste is, maar die in de tussentijd verder is gegaan. Dan is er plotseling geen ruimte meer voor een schot op doel.
Technische problemen met de sensor?
Als mens bouw ik een mentale kaart van mijn omgeving op. Ook al rolt de bal langs me heen en ik zie hem niet meer, ik heb nog steeds een idee waar de bal zich bevindt. Robots doen ook iets dergelijks. Ze berekenen hun eigen beweging en herinneren zich dat er iets was, ook al kunnen ze het nu niet zien. Hoe langer ze niet kijken, hoe ruwer de inschatting van de situatie achter hen. Het feit dat de robots er allemaal hetzelfde uitzien, maakt het er niet eenvoudiger op.
De robots sturen geen vriendschappelijk signaal?
Er staan nummers op. De menselijke scheidsrechter kan de cijfers gemakkelijk herkennen. Theoretisch zou onze software het nummer ook kunnen gebruiken. Maar in de praktijk is het niet zo gemakkelijk en we hebben er nog geen werk in gestopt.
Communiceren ze met elkaar?
De robots kunnen via WLAN gegevens uitwisselen. Elke teamrobot stuurt één keer per seconde de vastgestelde coördinaten naar de andere spelers; waar ben ik, waar denk ik dat ik ben, waar ben ik, waar ben jij, waar is de bal, etc.? Elke robot bouwt dan zijn eigen kaart van de spelsituatie.
Een belangrijk onderwerp in autonoom rijden: Om te weten waar andere weggebruikers zich bevinden, wat zijn de omgevingscondities, hoe snel zijn de andere weggebruikers …
Elk autonoom voertuig meet zijn omgeving met verschillende sensoren en bouwt zijn eigen constructie van zijn directe omgeving. Anders zou het heel snel zeer gevaarlijk worden.
In dit opzicht is het speelveld een geweldige testomgeving….
Ons nadeel bij robots is dat veel sensoren die in auto’s worden gebruikt te zwaar zouden zijn. De camera’s wegen slechts een paar gram. Hoe groter en zwaarder de robot, hoe hoger het energieverbruik en de krachten die optreden als hij valt. De mensachtige robot heeft energie nodig om te kunnen staan. In vergelijking daarmee zijn mensen indrukwekkend efficiënt.
Wel leuk dat mensen voor de verandering eens iets beters kunnen dan een robot.
Na duizenden jaren van evolutie is de mens al behoorlijk geoptimaliseerd, zodat ik een gewicht van zo’n 80 kilogram vrij lang kan verplaatsen, en dat met een relatief lage energietoevoer – een beetje water en een sandwich, dat is genoeg voor vele uren. De huidige robots zijn hier nog ver van verwijderd.





