
Transparante objecten hebben hun problemen. Het is niet voor niets dat wij silhouetten van vogels op grote glazen panelen plakken om hun echte soortgenoten te beschermen tegen botsingen met de doorzichtige barrière. Net zoals deze dieren moeite hebben om transparante oppervlakken te herkennen, zijn ook hier de mogelijkheden van robots beperkt. Zij kunnen geen glas of andere doorzichtige en glimmende oppervlaktes ‘zien’. zoals glanzende metalen, sterk reflecterende of diepzwarte oppervlakken. Vooral in de industriële omgeving heeft dit het gebruik van robots tot dusver bemoeilijkt. Veel automatiseringsprojecten lopen vast omdat niet-coöperatieve materialen slechts te langzaam of te onnauwkeurig kunnen worden gedetecteerd voor 3D-metingen, zo maakt het Fraunhofer Gesellschaft bekend in een persbericht.
3D-Sensor
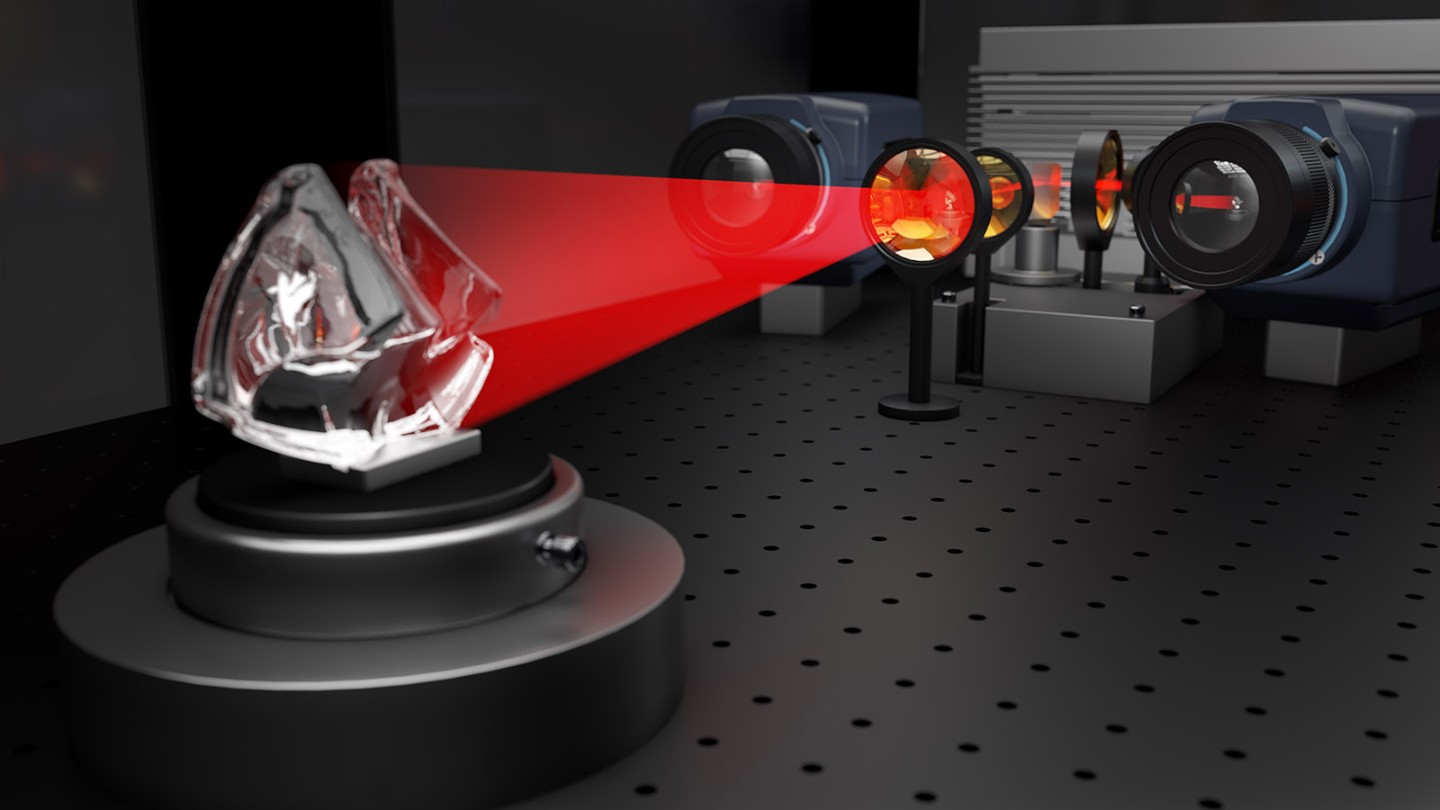
Vorig jaar hebben onderzoekers van het Fraunhofer IOF een nieuwe 3D-meetmethode ontwikkeld die dit probleem oplost: met de ‘MWIR-3D-sensor’, ook wel ‘Glass360Dgree’ genoemd – kunnen elementen met reflecterende of lichtabsorberende oppervlakken voor het eerst op betrouwbare wijze ruimtelijk worden gemeten. Daartoe combineert het systeem infrarode laserprojectie en thermografie: nadat het te meten voorwerp plaatselijk selectief is verwarmd, bepalen twee warmtebeeldcamera’s de temperatuurverdeling die op het oppervlak van het voorwerp ontstaat. In tegenstelling tot conventionele sensoren vereist het nieuw ontwikkelde systeem geen extra meethulpmiddelen of speciale markeringen die tijdelijk op het voorwerp worden aangebracht, bijvoorbeeld in de vorm van een tijdelijke coating.
Industriële processen
“Onze onderzoeksgroep werkt al jaren samen met bedrijven uit de meest uiteenlopende productiesectoren”, vertelt Dr. Stefan Heist, hoofd van de onderzoeksgroep “3D-sensortechnologie” van het Fraunhofer IOF. “Onder hen zijn bedrijven uit de halfgeleiderindustrie, de automobielindustrie en de luchtvaart. We hebben gekeken naar gezamenlijke projecten uit het verleden en geanalyseerd hoe onze 3D-glassensor in verschillende toepassingsscenario’s betere resultaten zou kunnen behalen dan conventionele sensoren”, legt de onderzoeker uit, die al jaren intensief werkt aan nieuwe methoden voor 3D-metingen. “Wij konden drie essentiële uitgangspunten identificeren om ons systeem geschikt te maken voor mogelijk gebruik in een grootschalige industriële productie-installatie”.
Het team vond het optimale evenwicht tussen de noodzakelijke mate van detail in de resolutie en de duur van een meting. Zij onderzochten ook verschillende opties voor het optische ontwerp van hun 3D-sensor om het meetveld variabel aan te passen aan de respectieve taak en de beschikbare ruimte binnen een produktiefaciliteit.
Bovendien heeft het team onder leiding van Dr. Stefan Heist en Martin Landmann, eveneens onderzoekers van het Fraunhofer IOF, intensief samengewerkt met onderzoekers van de Technische Universiteit Ilmenau om de gegevensverwerking van hun meetsysteem te optimaliseren. Het team van Ilmenau is erin geslaagd de actieve besturing van een robot en de bijbehorende gereedschappen op efficiënte wijze af te leiden uit de verkregen meetgegevens.
Flexibiliteit
Met zijn grote flexibiliteit en ongekende veelzijdigheid in de aard van de te scannen objecten opent ‘Glass360Dgree’ volledig nieuwe mogelijkheden in de automatisering van industriële processen en in productontwerp. Meer bepaald projecteren een hoogenergetische CO2-laser en een beweegbare optische assemblage met speciale lenzen een lijn die in verschillende stappen over het te meten voorwerp beweegt in fracties van een seconde. Tijdens de meting absorbeert het te meten voorwerp de energie van het laserlicht en zendt het die uit op een manier die duidelijk zichtbaar is voor de twee zeer gevoelige warmtebeeldcamera’s.
Speciale software, ontwikkeld door het Fraunhofer IOF, evalueert de beelden van de thermische handtekening die de smalle infraroodstrook gedurende korte tijd op het voorwerp achterlaat. De software gebruikt de twee verschillende kijkhoeken en de resulterende afwijking in het opgenomen franjespatroon om de ruimtelijke coördinaten te reconstrueren. Vervolgens voegt hij de gegevens samen tot de exacte afmetingen van het gemeten voorwerp. De voor de 3D-analyse ingevoerde thermische energie is zo gering dat het voorwerp niet wordt beschadigd: Het temperatuurverschil tussen verwarmd en onverwarmd oppervlak is gewoonlijk minder dan 3 °C.
Ook interessant: Start-up Apeiron laat robots samenwerken als mieren
Geselecteerd voor jou!
Innovation Origins is het Europese platform voor innovatienieuws. Naast de vele berichten van onze eigen redactie in 15 Europese landen, selecteren wij voor jou de belangrijkste persberichten van betrouwbare bronnen. Zo blijf je op de hoogte van alles wat er gebeurt in de wereld van innovatie. Ben jij of ken jij een organisatie die niet in onze lijst met geselecteerde bronnen mag ontbreken? Meld je dan bij onze redactie.
Als je dit artikel leuk vindt, lees dan ook:





