


Rescue operations are usually carried out in extreme weather conditions. Floods, storms, and heatwaves are some of the most frequent scenarios. This is why leveraging modern technology to design better systems to improve life-saving interventions can be critical to carrying them out more effectively.
Earlier this year, NATO launched Project-X, a student challenge aimed at finding new solutions that can be deployed in these incidents. To do that, the Alliance partnered with Boeing, the Delft University of Technology, and the Unmanned Valley.
After the design phase – which 30 students involved – two teams of five students each passed on to the second stage of the challenge. Team Alpha and Team Monarch are the two cohorts currently working on the prototyping. The winning team will showcase its solution during the NATO summit in Madrid at the end of June.
How can we develop a collaborative solution that can autonomously access and evaluate hazardous areas and situations? That is the question students had to address. “A lot of drones nowadays are autonomous, but they cannot work with each other. So our concepts should make them work together,” says Remco Roelofs. He is part of Team Alpha.

Mapping points of interest and being rewarded for that
Team Alpha is working on a system whereby drones will be able to survey a given dangerous area and identify the main points of interest, such as any damages or people. “Autonomous drones will be deployed in that area and they will work together, thanks to our economic incentivized model” explains Dennis van Eck van der Sluijs. He is another member of the team.
A mission controller sets the tasks that the drones have to complete. Upon their completion, they are awarded a specific number of tokens, depending on how difficult the mission was.

“After identifying the points of interest, other drones will be required to verify them. This way, more accurate information can be sent to NATO, which can use it during rescue operations,” Van Eck explains. “Moreover, the aircraft that are involved will have the same program installed, so they know exactly what the other ones are doing. Our solution is scalable, the more drones you have, the more accurate the measurements can be made.”

Hierarchy of drones
By contrast, Team Monarch came up with a different way of enabling UAVs cooperate. In fact, their concept mimics a military hierarchy.
“In our system, there are three different kinds of drones, that all perform different duties. The main drone gets to coordinate all the operations, being the head of command. It is a computing unit. Under it, four or five superiors are responsible for managing the activities of a different group of drones, which are those surveying the area and looking for targets” Yuri Laar clarifies, who is part of Team Monarch.
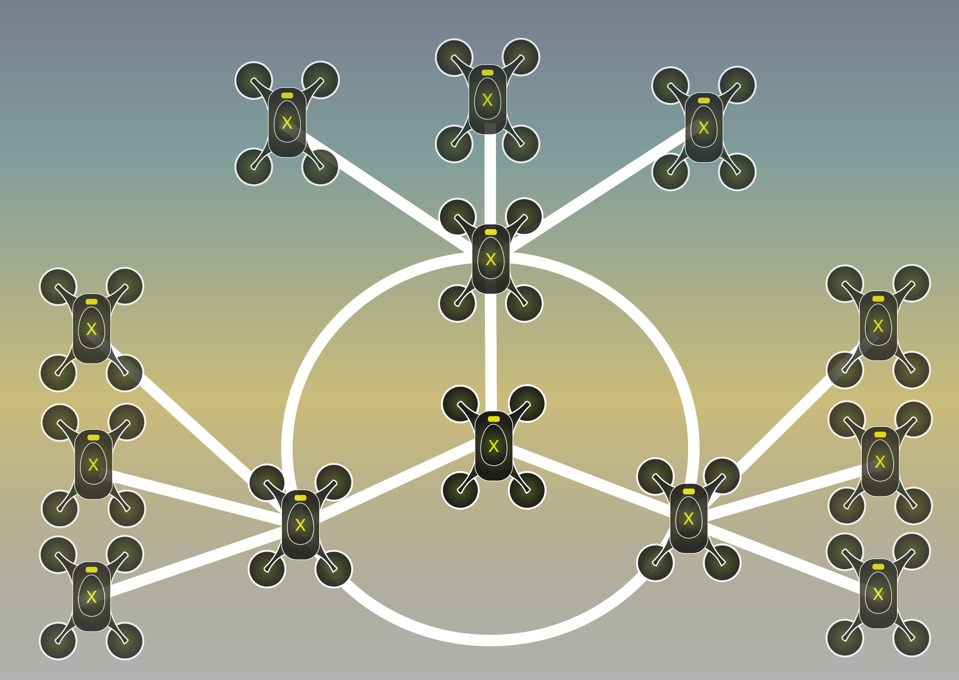

Sensor and operating units
Despite the fact that they are competing with each other, the two teams are also helping each other. Both cohorts are made up of international students from the TU Delft and from the Univesity of Leiden. Each of them brings different expertise to the team. Most of them are – or will hopefully soon be – engineers, but some of them are also studying security.
They will continue to fine-tune their ideas, which need much more time to be tested and brought into practice. It will be up to NATO to decide which solutions can best be put into operation. What is sure is that drones – and the data they collect through sensors – will continue to play a role in strategic operations, either in a centralized or decentralized way.
Related Posts





