

Roboter können Dinge sehr schnell einpacken. Deshalb sind sie in Verteilungszentren unentbehrlich geworden. Aber sie sind immer noch nicht sehr schlau. Deshalb können Menschen ihre Arbeit manchmal viel schneller erledigen. Weil sie in der Lage sind, Dinge zu antizipieren und selbstständig zu denken. Das Problem ist, dass immer weniger Menschen Lust haben, diese Art von Arbeit zu tun. Deshalb startet die TU/e (Technische Universität Eindhoven) zusammen mit zwei weiteren Universitäten, einem Wissensinstitut und vier Unternehmen ein vierjähriges Forschungsprojekt über einen Verpackungsroboter, der in der Lage ist, einen Menschen für diese Art von Aufgaben zu ersetzen.
Roboter können Routineaufgaben sehr gut erledigen. Man kann sie so programmieren, dass sie Gegenstände aufnehmen und in eine Kiste oder auf ein Förderband legen. Dennoch gibt es einen gravierenden Nachteil. Da Roboter die Auswirkungen eines Aufpralls nicht vorhersehen können, stoppen ihre Arme derzeit, kurz bevor sie ein Paket aufnehmen oder irgendwo ablegen. Dadurch wird verhindert, dass ein Gegenstand gegen etwas Hartes stößt und ein Schaden entsteht.
Menschen können die Auswirkungen eines Aufpralls viel besser vorhersehen, weshalb sie auch wesentlich schneller sind. Sie sind in der Lage, einen Gegenstand in einer schnellen, flüssigen Bewegung auf ein Förderband zu legen. Oder sie können ihn sogar werfen, ohne einen Schaden bei dem Gegenstand, dem Förderband oder sich selbst zu verursachen.
Aufprallbewusste Lernroboter
Forscher der TU/e untersuchen zusammen mit Kollegen der Technischen Universität München (TUM), der École polytechnique fédérale de Lausanne (EPFL) und dem französischen Forschungsinstitut CRNS, wie sie einen auswirkungsbewussten Logistikroboter entwickeln können. Die neuen Roboter sollen die Auswirkungen einer harten oder weichen Kollision mit der Umgebung oder mit anderen Objekten zuverlässig vorhersagen können, damit sie diesen Zusammenstoß ausnutzen können, um Gegenstände schneller aufzunehmen und abzulegen. Alessandro Saccon, Forschungsleiter im Auftrag der TU / e, erwartet, dass sie dadurch 10 Prozent schneller arbeiten können.
Die Forscher wollen dies auf verschiedene Weise erreichen:
- durch die Entwicklung fortschrittlicher Modelle, die vorhersagen können, was passiert, wenn der Roboter, das Paket oder das Förderband zusammenstoßen;
- durch den Einsatz künstlicher Intelligenz, die dem Roboter beibringt, wie er sich schnell bewegen kann, ohne Schaden zu verursachen;
- und durch die Entwicklung fortschrittlicher Sensoren, die dem Roboter Ohren und Augen geben, so dass er weiß, was bei einer Kollision passiert.
Verpackungsroboter spielen eine wichtige Rolle in der Logistik
“Aufprallbewusste Roboter können eine wichtige Rolle in der Logistik spielen”, sagt Saccon. „Der E-Commerce boomt und in einem angespannten Arbeitsmarkt wird es immer schwieriger, Arbeitskräfte zu finden. Darüber hinaus ist die Arbeit in Vertriebszentren oft nervenaufreibend und gesundheitsschädlich. Aufprallbewusste Roboter können dann eine Lösung anbieten, damit die Mitarbeiter ihre Hände für andere Arbeiten frei haben.“
Die Forscher arbeiten bei diesem Projekt eng mit vier Unternehmen zusammen, die sich auf Logistik, Automatisierung, Roboterproduktion und physikalische Simulation spezialisiert haben: Vanderlande und Smart Robotics aus den Niederlanden, Franka Emika aus München und Algoryx aus Schweden.
Bewusste Manipulation der Auswirkungen
Das Forschungsprojekt heißt I.AM. Das steht für Impact Aware Manipulation. Die Europäische Union unterstützt das Projekt mit 4,4 Millionen Euro. Weitere Informationen über das Projekt finden Sie auf der offiziellen Website von I.AM.
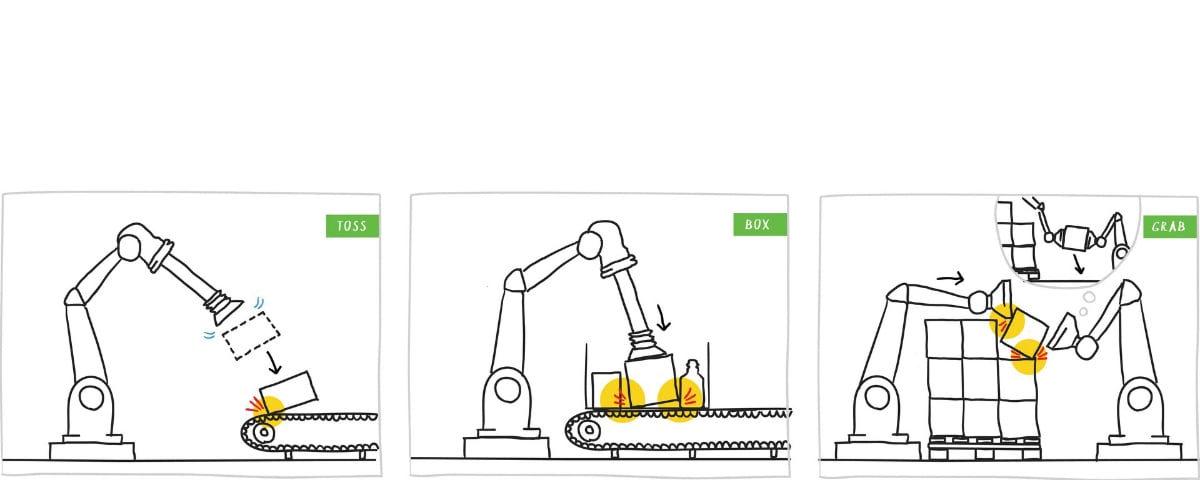
Titelbild: Das I.AM-Forschungsprojekt untersucht drei Szenarien für den Einsatz von aufprallbewussten Robotern. Jedes Szenario ist komplexer als das vorherige. In Szenario 1 wird ein Paket auf ein Förderband geworfen (TOSS). In Szenario 2 wird ein Paket in eine Kiste (BOX) gelegt. Und in Szenario 3 wird ein schweres Paket von einer Palette entfernt (GRAB). (Abbildung: Visueeltjes)
Related Posts:





